|
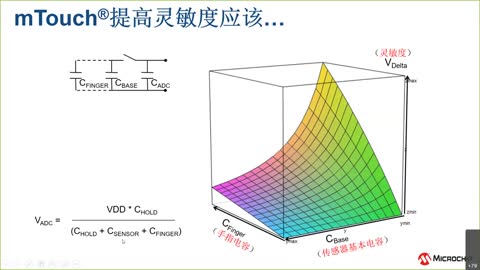
Ŀ��(bi��o)��ۙ����Ӌ(j��)��C(j��)ҕ�X��һ��(g��)�O������(zh��n)�Ե��о��΄�(w��)���ѱ��V���đ�(y��ng)�����˙C(j��)���������ܱO(ji��n)�ء��t(y��)�W(xu��)�D��̎�����I(l��ng)���С�Ŀ��(bi��o)��ۙ�ı��|(zh��)���ڈD���������R(sh��)�e��Ŀ��(bi��o)��ͬ�r(sh��)��(du��)���M(j��n)�о��_��λ�����˿˷������ړ��������ĸ�׃�Ȍ�(du��)Ŀ��(bi��o)�R(sh��)�e���������y�����F(xi��n)�˺ܶ�ĸ�ۙ�㷨�� ��?y��n)�Ŀ�?bi��o)��ۙ�㷨��Ҫ̎���Ĕ�(sh��)��(j��)�����\(y��n)���(f��)�s����Ҫ����(qi��ng)���̎�������܌�(sh��)�r(sh��)̎�����҂��x��TI�Ƴ������®a(ch��n)ƷTMS320DM6446��(sh��)�F(xi��n)�㷨��TMS320DM6446��һ��߶ȼ��ɵ�Ƭ��ϵ�y(t��ng)�������˿����\(y��n)���l�ʸ��_(d��)594MHz��C64x+ DSP�˺�297MHz��ARM926̎�����ˡ�������߀�����˔�(sh��)��ҕ�l������S���ⲿ�M������ҕ�l���������W(w��ng)�j(lu��)���O(sh��)�������ⲿ�惦(ch��)�ӿڡ����O(sh��)Ӌ(j��)�������DM6446�ď�(qi��ng)���\(y��n)����������DSP��(n��i)���ό�(sh��)�r(sh��)�\(y��n)��Ŀ��(bi��o)��ۙ�㷨�� �O(sh��)Ӌ(j��)߀��ARM̎�����ψ�(zh��)�жྀ�̑�(y��ng)�ó���ؓ(f��)؟(z��)ҕ�l�ɼ����@ʾ���W(w��ng)�j(lu��)ͨ�ţ�����������Ƶȹ����� �㷨��B ��ϵ�y(t��ng)��(sh��)�F(xi��n)��ҕ�l��ۙ�㷨�Ʌ����īI(xi��n)-������(g��)�㷨�֞�����㷨���M(j��n)�㷨�ɲ��֡����㷨��һ�N����ģ��ƥ�似�g(sh��)�ĸ�ۙ�㷨�������ֹ��x�����Ԅ�(d��ng)�x���˴���ۙĿ��(bi��o)����ȡĿ��(bi��o)�����^��Ϣ����ģ�壬�ں��m(x��)��ҕ�l�����У������x�D��^(q��)���cĿ��(bi��o)ģ���M(j��n)��ƥ�䣬�������ƵĈD��^(q��)�������\(y��n)��(d��ng)Ŀ��(bi��o)��(d��ng)ǰ��λ�á��ڱ����У����ýY(ji��)��(g��u)���ƶȣ������wһ�������P(gu��n)ϵ��(sh��)��������x�^(q��)���cĿ��(bi��o)ģ�����Ƴ̶ȵĶ�����(bi��o)��(zh��n)����Ӌ(j��)�㹫ʽ������ʾ�� ��ʽ�У�f(m,n)��g(m,n)�քe��Ŀ��(bi��o)ģ��ͺ��x�^(q��)��ĻҶ�ֵ��ꇣ��ߴ��MxN��uf��ug�քe��Ŀ��(bi��o)ģ��ͺ��x�^(q��)��ĻҶ�ƽ��ֵ��Ȼ�������f(m,n)��g(m,n)�ąf(xi��)���f(m,n)�ķ��g(m,n)�ķ��������wһ�������P(gu��n)ϵ��(sh��)��ʽ(1)ͨ�^�ĻҶ�ֵ����Мpȥ�ҶȾ�ֵ����Ч�������˹��սo��ۙ�Y(ji��)��������Ӱ푡�����(du��)��ƥ��D��^(q��)��������������_(d��)���p��ƥ��Δ�(sh��)�Ķ�����Ӌ(j��)������Ŀ�ģ��҂����b��ҕ�l���s�I(l��ng)���е�����������(Three Step Search, TSS) ������ƥ���c(di��n)�������㷨�� ��������ģ��ƥ��ҕ�lĿ��(bi��o)��ۙ�㷨�������ԣ��҂�?c��)ڻ����㷨�Ļ��A(ch��)�ό�(sh��)�F(xi��n)�˸��M(j��n)�㷨�IJ��֡����M(j��n)�㷨�������m��(y��ng)�ړ�̎���cģ��Ư�����Ƶ��������܉�ܺõؽ�Qǰ���ᵽģ��ƥ���ҕ�lĿ��(bi��o)��ۙ�㷨��Ҫ��Q���y�}�����w���f����Ҫ���������c(di��n)���M(j��n)��(1) ����Ư�ƵĎ��ڱο��������^�V���㷨(Drift-Inhibitive Masked Kalman Appearance Filter, DIMKAF ) ��(2) ��(n��i)�����m��(y��ng)�u�M(j��n)ʽ�ړ������㷨(Content-Adaptive Progressive Occlusion Analysis, CAPOA)��(3) ��׃�ڱ�ģ��ƥ���㷨(Variant-Mask Template Matching, VMTM)��(4) �ֲ��(y��u)ƥ���b���㷨(Local Best Match Authentication, LBMA)�� ���M(j��n)������(g��)�㷨�����̈D������ʾ�� �D 1 ��ۙ�㷨�����̈D �㷨��DavinciSOC�ϵČ�(sh��)�F(xi��n) DSPƽ�_(t��i)���x�� DM6446����ARM�cDSP �p�˽Y(ji��)��(g��u)������ARM��ϵ�y(t��ng)���d297 MHz���l��ARM926 �ˣ�DSP���քt����594 MHz��C64x+DSP�ˣ�����惦(ch��)��֧��256 MB DDR2 RAM��惦(ch��)��������ʹ����VPSS ��ϵ�y(t��ng)�S����ҕ�lǰ��̎�����ܣ��Ҷ���������Ƶ����O(sh��)�ӿڡ�Ŀ��(bi��o)��ۙ�㷨��Ҫ�������\(y��n)�㣬DM6446 DSP�ˏ�(qi��ng)����\(y��n)��̎���������C���㷨�Č�(sh��)�r(sh��)̎����ͬ�r(sh��)DM6446��ARM�˿����M(j��n)��ϵ�y(t��ng)��������(sh��)��(j��)�x�����W(w��ng)�j(lu��)��ݔ?sh��)�̎���? �҂�ʹ��Spectrum Digital��˾��DVEVMƽ�_(t��i)�M(j��n)���㷨������ԭ��������ܛ����(y��u)����DVEVM?߀�Ɍ�(sh��)�F(xi��n)ҕ�lݔ�룯ݔ���B�ӡ��W(w��ng)�j(lu��)�ӿڡ��惦(ch��)���ӿ��Լ���(bi��o)��(zh��n)���ӿ��B�ӵȡ� ϵ�y(t��ng)ܛ����� ����(g��)ϵ�y(t��ng)��ܛ�������D2��ʾ��DM6446��ARM���\(y��n)�л���Linux����ϵ�y(t��ng)�đ�(y��ng)�ó������õ�����O(sh��)�䶼��ARMؓ(f��)؟(z��)���ơ�ARM�˵�HTTP����(w��)��ͨ�^Linux�W(w��ng)�j(lu��)�f(xi��)�h����̎��HTTPՈ(q��ng)���l(f��)�͉��sҕ�l��(sh��)��(j��)��ҕ�l��ۙ�đ�(y��ng)�ó������傀(g��)POSIX���̽M�ɣ��քe��ҕ�l�����̣�ҕ�l��ۙ���̣�ҕ�l���s���̣��@ʾ���̣�ϵ�y(t��ng)���ƾ��̡�ҕ�l������ͨ�^V4L2�ӿ��O(sh��)���(q��)��(d��ng)�Ĕz���^�xȡԭʼҕ�l��(sh��)��(j��)��ҕ�l��ۙ���̰�ҕ�l��(sh��)��(j��)�͵�ARM��DSP�Ĺ������_��(n��i)�棬��֪ͨDSP��(zh��)�и�ۙ�㷨�����s����ؓ(f��)؟(z��)����DSP��(c��)�ĉ��s�㷨���Ĺ����(n��i)�����xȡ���s��(sh��)��(j��)��ҕ�l�@ʾ���̏�ҕ�l�������xȡҕ�l��(sh��)��(j��)�������B��Ŀ��(bi��o)��ۙ�����ͨ�^Frame Buffer�O(sh��)���(q��)��(d��ng)ݔ���@ʾ��ϵ�y(t��ng)���ƾ���ؓ(f��)؟(z��)푑�(y��ng)�b���������(bi��o)����(zh��)������(y��ng)������ �D 2 ܛ���Y(ji��)��(g��u)�D DM6446��DSP�����\(y��n)��DSP/BIOS��(sh��)�r(sh��)����ϵ�y(t��ng)��Ŀ��(bi��o)�z�y(c��)����ۙ�㷨��ҕ�l���s�㷨�����е��㷨�Ľӿڶ�����TI xDAIS��(bi��o)��(zh��n)����Codec Engine�{(di��o)�á������㷨��DSP����߀�����˹����(n��i)���DMA��Framework Component�� ARM�˺�DSP�˵�ͨ����TI�ṩ��Codec Engineܛ�����ؓ(f��)؟(z��)��Codec Engine�ǽ��ڑ�(y��ng)�ó���;��w�㷨֮�g��ܛ��ģ�K�����е�VISA APIͨ�^stub��skeleton�L��Engine SPI��K�{(di��o)���㷨��ARM��DSP�����ù������_��(n��i)�涼��ͨ�^CMEMģ�K��DDR�з���ģ����_��(n��i)���ַ�B�m(x��)���cDSP��Cache��(du��)�R�� ��ۙ�㷨��DSP�ϵă�(y��u)�� ���˳�ְl(f��)�]��Davinci SOC��(qi��ng)���ҕ�l̎���������M�㌍(sh��)�r(sh��)��ۙ����Ҫ���҂�ͨ�^�㷨��(y��u)���;��̃�(y��u)����Y(ji��)�ϵķ�����(du��)Codec�����M(j��n)���˴����ă�(y��u)���� �㷨��(y��u)�� �㷨��(y��u)����ָ�ڲ������㷨���ܵ���r�£����õ�Ч�㷨������Ӌ(j��)�������҂��Ĺ�����Ҫ�����ڡ��wһ�������P(gu��n)ϵ��(sh��)����Ӌ(j��)�����̵ĺ�(ji��n)���ϡ�����(j��)��ֵ�ͷ�������|(zh��)���҂����Ԍ�(1)ʽ����(ji��n)�飺 ��ʽ�cʽ(1)���^���p���˴����ļӜp��Ӌ(j��)�㣬���Ҍ�����ͅf(xi��)�����Ӌ(j��)���D(zhu��n)��������ij˼��\(y��n)�㣬�@���҂�����ľ��̃�(y��u)��Ҳ�ṩ�˘O��ı���������M=64, N="64�r(sh��)"���ӷ��Δ�(sh��)��36864�p�ٵ�12288�� ���̃�(y��u)�� ���̃�(y��u)������Ӌ(j��)������׃����r�£�����(j��)Davinci̎����DSP���ĵ����c(di��n)��ͨ�^��(y��u)���惦(ch��)���Ĵ�ȡЧ�ʺ���߳���IJ��л��̶ȁ��s�̳����\(y��n)������Ҫ��ָ�����ڔ�(sh��)����ʹ�����\(y��n)�еø��졣�҂��ľ��̃�(y��u)��������Ҫ����ʹ��dsplib��ʹ�þ��ԅR����ʹ�Ã�(n��i)(li��n)����(sh��)�Լ�ѭ�h(hu��n)չ�_���傀(g��)���棬���挢һһ���Խ�B�� dsplib��ʹ�� �ڃ�(y��u)���^���У��҂�߀������CCS���ṩ�Ď�(k��)����(sh��)�팦(du��)���a�M(j��n)�Ѓ�(y��u)����CCS��ᘌ�(du��)c64x+ DSP�ṩ�˸߶ȃ�(y��u)����dsplib��(k��)����(sh��)���Ñ�ʹ�ã��@Щ��(k��)����(sh��)�ṩ�˔�(sh��)����̖(h��o)̎���г�Ҋ��̎�����̣������ɅR���Z(y��)�Ԍ��ɣ����ИO��Ч�Ĵ��aЧ�ʡ��e������Ӌ(j��)������?j��)?n��i)�e��DSP_dotprod��DSP_vecsumsq����(sh��)���ÝM�����҂���Ӌ(j��)��������Ӌ(j��)��ߴ��32x32�ġ��wһ�������P(gu��n)ϵ��(sh��)���r(sh��)����(y��u)����Ӌ(j��)�� ����ֻ��Ҫ271��(g��)DSP�r(sh��)����ڣ���Ӌ(j��)�� �Ͳ���ֻ��Ҫ267��(g��)DSP�r(sh��)����ڣ��@�������˳����\(y��n)�е��ٶȡ� ���ԅR�� ��(du��)��uf��ug��Ӌ(j��)�㣬���ʹ��forѭ�h(hu��n)��(sh��)�F(xi��n)������(hu��)�����������(g��)���wһ�������P(gu��n)ϵ��(sh��)��Ӌ(j��)�����̵Ĉ�(zh��)��Ч�ʡ��҂����ֹ��������ԅR�����a�ķ�ʽ��(sh��)�F(xi��n)��dspsum����(sh��)������C64x + DSP�е�8��(g��)����Ӌ(j��)���Ԫ����ÿ��(g��)DSP �r(sh��)����ڃ�(n��i)ͬ�r(sh��)�M(j��n)��4��(g��)16λ��16λ�ļӷ���������(du��)�ڳߴ��32x32�����Ӌ(j��)����ԣ�ԓ����(sh��)ֻ��Ҫ258��(g��)DSP�r(sh��)����ڡ� ��(n��i)(li��n)����(sh��)��ʹ�� C64x+���g���ṩ�ă�(n��i)(li��n)����(sh��)�ɿ��ك�(y��u)��C���a����(n��i)(li��n)����(sh��)��ֱ��ӳ����(n��i)(li��n)��C64x+ָ������⺯��(sh��)����(n��i)(li��n)����(sh��)��ǰ�»���(_)����ʾ��ʹ�Õr(sh��)ͬ�{(di��o)����ͨ����(sh��)һ��ʹ�������҂�?c��)ڃ?y��u)���^���У�ʹ�����S����(n��i)(li��n)����(sh��)����_round()�ȣ��������˴��a�Ĉ�(zh��)��Ч�ʡ� ѭ�h(hu��n)չ�_ ����for���g(sh��)ѭ�h(hu��n)��Ҫ���C64x+ DSP��(n��i)����ܛ����ˮ�������l����forѭ�h(hu��n)��(hu��)���DSP��̎��Ч�ʣ������҂�?c��)ڃ?y��u)���^���У�������forѭ�h(hu��n)�M(j��n)����չ�_���Դ��a���Ӟ���r(ji��)����˴��a�Ĉ�(zh��)��Ч�ʡ�ͨ�^�����������Ɍ����a��̎��Ч�����3-5���� �y(c��)ԇ�Y(ji��)�� ���˫@��ҕ�l��ۙ�㷨Codec�\(y��n)������Ҫ��DSP�r(sh��)����ڔ�(sh��)���M(j��n)����Ӌ(j��)����(y��u)������㷨���a�Ƿ��ѽ�(j��ng)�M�㌍(sh��)�r(sh��)��ۙ����Ҫ���҂�ʹ��CCStudio v3.3��(du��)ͬһ�y(c��)ԇ���У�ͬһ��ʼĿ��(bi��o)λ�ã���ͬ��Сģ�����r�M(j��n)�����x�����档 �� 1 ҕ�l��ۙ�㷨��(y��u)���Y(ji��)�� �� 2 DSPؓ(f��)�d�y(c��)ԇ �Y(ji��)Փ �҂�?c��)ڻ����p��DM6446��ϵ�y(t��ng)ƽ�_(t��i)�ϣ����ø��M(j��n)��ĸ�ۙ�㷨��(sh��)�F(xi��n)������Ŀ��(bi��o)��ۙϵ�y(t��ng)��DM6446 ARM���ϵ�Linux����ϵ�y(t��ng)�ϵĶྀ�̳���ؓ(f��)؟(z��)ҕ�l�ɼ���ҕ�l�@ʾ���㷨���ơ�����O(sh��)��̎�����΄�(w��)��ͨ�^��TI Codec Engineܛ���ܘ�(g��u)�U(ku��)չĿ��(bi��o)��ۙ�㷨�Ľӿڣ��҂��ɹ���DM6446��DSP�����\(y��n)���˸�ۙ�㷨����(j��ng)�^�㷨��(y��u)���;��̃�(y��u)����ϵ�y(t��ng)���Ԍ�(du��)�ɼ�ݔ���25fps��720��480�ֱ���ҕ�l�е�128��128��С��Ŀ��(bi��o)�M(j��n)�Ќ�(sh��)�r(sh��)��ۙ����(sh��)�(y��n)�Y(ji��)��������ԓ�㷨���Գɹ���ۙĿ��(bi��o)���������^��(qi��ng)�������ԡ�ԓ���g(sh��)����(hu��)������ҕ�l�O(ji��n)���������Ñ��ӿڡ����ڌ�(du��)���ҕ�l���s��Ѳ����(d��o)��ĩ���ƌ�(d��o)���o���{���I(l��ng)���ЏV����(y��ng)��ǰ���� |