|
近年來,隨著經濟的高速發展和汽車的逐漸普及,城市的交通問題已經引起人們越來越多的關注,城市道路照明的重要性也日益增大。目前,我國大部分城市的路燈照明都采用"全夜燈恒照度"的方式,控制方式仍然是簡單的光控和時控等傳統方式,這大大增加了城市的用電量,為此,政府承擔著巨額的財政支出,而路燈照明設備的使用壽命也大大降低。因此,引入智能交通系統(ITS)成為提高城市交通管理水平的一個重要途徑。 本設計以低功耗單片機MSP430為主控部件,采用熱釋電紅外傳感器檢測人體及車輛發出的紅外信號,運用光敏電阻檢測背景光的強度,通過恒定電流源來控制LED燈光的強度。根據各個季節天黑的時間不同設置各自的路燈開啟和關閉時間,在規定時間對移動物體進行檢測,實現對路燈的智能化控制,提高了路燈照明的有效性,避免了電力資源的浪費。 1 熱釋電紅外傳感器與菲涅耳透鏡 利用紅外線傳感器可以檢測到物體發射出的紅外線,從而可以檢測到不同物體的存在。制造熱釋電紅外傳感器的材料,以陶瓷氧化物及壓電晶體用得最多,這類材料具有強烈的自發極化性能,當受到熱輻射而產生溫度變化時介質的極化狀態隨之發生變化。由于內部電荷的速度遠遠高于表面電荷的變化速度,晶體兩端會產生數量相等而極性相反的獨立電荷,這就是電介質的熱釋電效應。熱釋電紅外傳感器就是利用被測物體熱輻射引起敏感元件溫度的變化進行探測的。熱釋電紅外傳感器被廣泛應用到安防監控、電子防盜、自動控制照明和工業自動控制等領域。 物體釋放的紅外線能量十分微弱,當直接用熱釋電紅外傳感器接收紅外線時,靈敏度相對較低,一般情況下很難滿足系統需求。為了提高熱釋電紅外傳感器的接收靈敏度,在其表面罩上一片菲涅耳透鏡,其探測距離可以增加到原來的5~7倍。菲涅耳透鏡[1]是一種由聚乙烯材料根據菲涅耳原理制成的塑料薄紋透鏡,對紅外線的透射率大于65%.根據菲涅耳透鏡的工作原理可知,當有移動物體發射的紅外線進入透鏡的探測范圍,菲涅耳透鏡會產生一個交替的"盲區"和"高靈敏區",熱釋電紅外傳感器的兩個反向串聯的敏感元件輪流檢測運動物體,形成一系列光脈沖后,進入傳感器。所以,熱釋電紅外傳感器無法檢測到靜止的物體。菲涅耳透鏡在安裝時與熱釋電紅外傳感器之間的距離應滿足與菲涅耳透鏡的焦距相等。 2 LED路燈智能控制系統硬件設計 控制系統硬件組成以MSP430為核心控制器,輔以外圍電路如AD/DA 數據采集處理系統模塊、熱釋電紅外傳感器模塊、背景光檢測模塊和LED驅動模塊等。其系統硬件框圖如圖1所示。 
2.1 數據采集模塊 2.1.1 物體定位檢測 信號探測采用被動式雙元熱釋電紅外傳感器P2288,并在其表面罩上一個菲涅耳透鏡用來提高其探測靈敏度。它以非接觸形式檢測出人體及車輛放射出的微弱紅外線能量并轉化成電信號輸出,物體定位檢測電路如圖2所示。當P2288探測到有人或者車輛進入到探測區域,P2288產生一個交變紅外輻射信號,并輸出一個微弱的電壓信號(TTL電平)。
信號經過二級運放后輸入到雙限比較器當中,其中RW3用來調節二級運放的放大倍數,RW4用來設定兩個門限電平Uref1(U7處)和Uref2(U8處),當探測電壓大于Uref1時,U7輸出高電平,U8輸出低電平,則D2導通而D3截止,熱釋電OUT 為高電平;當探測電壓低于Uref2時U7輸出低電平,U8輸出高電平,則D2截止而D3導通,熱釋電OUT為高電平;當探測電壓介于Uref1和Uref2之間時D2和D3都截止,熱釋電OUT為低電平。經過放大和整形的信號輸入到單片機當中。 2.1.2 背景光檢測 光敏電阻是利用半導體的光電效應制成的一種電阻值隨入射光的強度變化而改變的電阻器,入射光強時電阻值減小。背景光檢測電路如圖3(左)所示,三極管的集電極輸出電壓輸入到A/D轉換器當中。由于單片機當中已經集成了高精度的12位A/D 數模轉換器,故選用其內部A/D轉換器,其模擬量輸入控制范圍在0~5V,由單片機的存儲及其控制寄存器Sref位確定。
當背景光強度強時光敏電阻阻值減小,三極管處在非工作狀態,三極管的集電極輸出低電平;當背景光強度較弱的時候光敏電阻阻值增大,三極管處在工作狀態,三極管的集電極輸出高電平。當輸出高于設定值時,物體定位檢測子系統開啟。 同時為避免由于其他原因(如雷電、光源等)造成的影響,設置路燈開啟判斷時間為30s,30s后單片機檢測到三極管的集電極輸出確實高于預設值時,單片機發出物體定位檢測開啟信號。 2.2 LED恒流源驅動模塊及PWM 驅動方式 LED由于壽命長、節能、環保和光電效率高等眾多優點,成為了照明領域關注的焦點。根據LED的伏安特性曲線可知,LED正向伏安特性非常陡,微小的驅動電壓的波動就會導致LED驅動電流的急劇變化,這將直接影響到LED的壽命、光通量和可靠性。LED 獨特的電氣特性使得LED驅動電路也面臨更大的挑戰,LED驅動電路關系到整個LED照明系統性能的可靠性。因此為防止LED的損壞,要求所設計驅動能夠精準控制LED的驅動電流。本系統設計的恒流源是在恒壓源模式控制上增加了一個電流串聯負反饋,恒流源的輸出值也反映了電壓源輸出的大小,但其可以精確控制LED的驅動電流,從而穩定控制LED的亮度。恒流源驅動電路如圖3(右)所示。電流串聯負反饋由U4和Q3組成。 系統采用PWM 對LED光亮度進行調節。用PWM 對LED進行調光實際上是某一固定直流電壓經過以一定頻率打開與閉合的開關,從而改變LED上的電壓。假設某一固定直流電壓能夠提供的最大電流為Imax,開關頻率為f 且閉合周期為t,則有通過LED的平均電流I為:
因此只要改變閉合周期t就可以改變通過LED的平均電流,進而改變LED的亮度。假設系統輸出的PWM 的占空比為τ,PWM 的頻率和輸出電壓分別為f 和UPWM,則由圖3電路可知通過LED的電流值為:
式中,t0=Tτ,i為電流的瞬時值,UPWM為PWM的輸出電壓。在獲得同樣的發光亮度時脈沖電流驅動方式比直流電流驅動方式所需要的電流值更小,所以脈沖電流驅動可以給系統帶來高效性。 3 LED路燈智能控制系統軟件設計 根據硬件設計時各個模塊的功能和要求,系統軟件的設計主要是和硬件電路相結合。本次設計將系統功能分為具有獨立子功能的控制模塊。 設計采用模塊化的方式更易于閱讀和理解,軟件結構更加清晰,而且利于軟件調試。系統軟件方案主要由初始化程序、背景光檢測程序、人體紅外信號檢測程序和RS-485協議等[6]構成。電路上電啟動后,單片機進行初始化操作,電路控制系統進入工作狀態,該系統的工作流程圖如圖4所示。 在規定亮燈時間內,如果背景光強度較弱,上位機向下位機發送開始工作命令和信息,否則下位機等待響應上位機發送命令。下位機響應后,當有人或者車輛進入紅外探測區域單片機根據背景光的強度,輸出脈寬調制信號PWM,驅動控制器點亮LED,保證LED光強度足以滿足路面的可見度。如果下位機沒有探測到紅外信號,路燈LED熄滅。
圖4 LED路燈智能控制系統流程圖 4 實驗結果及分析 由于到達現場進行實驗有一定的難度,所以實驗仿真只對人體紅外信號進行了檢測。設置系統規定亮燈時間段為PM 6:00~7:00,將熱釋電紅外傳感器固定在實驗室臺上,傳感器的輸出端接在示波器的探頭上,人走向傳感器探測區域,觀察示波器上有無波形輸出。測試結果如表1所示,A表示傳感器沒有罩上菲涅耳透鏡的輸出結果;B表示傳感器罩上菲涅耳透鏡的輸出結果。結果表明,系統可以精確控制智能路燈的開啟時間;菲涅耳透鏡可以顯著提高傳感器的探測靈敏度。 表1 傳感器檢測輸出結果
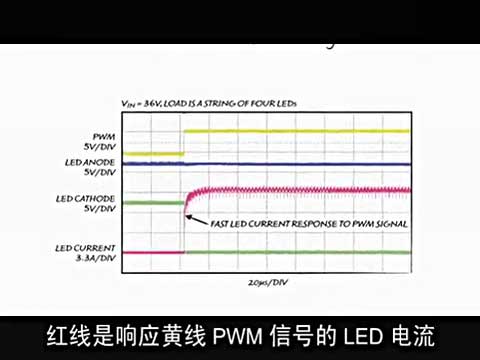
測試恒流源驅動電路的時候選用1 W 的大功率LED燈珠,通過調節PWM 的占空比來檢測通過LED的電流值。如果LED亮暗的頻率超過100Hz,人眼看到的就是平均亮度,而不是LED的閃爍。實驗仿真設定PWM 輸出信號的頻率為1kHz,實驗仿真結果如表2所示。從表2看出,恒流源的誤差精度在±4mA,LED的工作電流與PWM 輸出信號的占空比成正比關系。恒流源驅動電路雖然簡單,但其性能非常優秀。 表2 LED路燈工作電流測試
5 結 語 研究設計智能化、運行可靠和高效節能的路燈控制系統,是智能交通系統的必然需求。LED路燈智能控制系統以低功耗單片機為系統控制核心,使用RS-485通信協議完成上位機對下位機的控制,通過熱釋電傳感器探測人與車輛發出的紅外信號,利用MSP430的內部資源PWM 實現了路燈的智能調光控制。系統設計完全從節能和性價比的角度出發提高了路燈的用電效率和智能化程度,在節約能源、電力資源合理利用的今天,該系統有著十分廣闊的社會和商業前景。 |