|
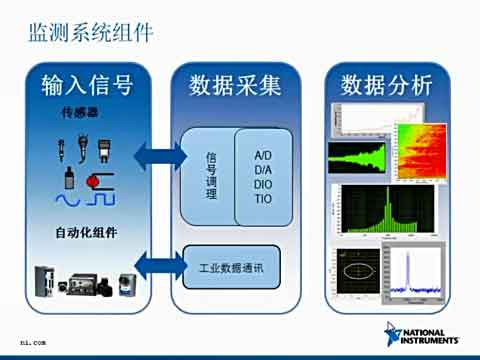
近些年來,隨著科技的快速發(fā)展,測量機器人的應(yīng)用也越來越多。其技術(shù)發(fā)展也越來越先進。測量機器人具有全時工作、偶然誤差影響小的特點。在危險的環(huán)境里面應(yīng)用廣泛。隨著市政建設(shè)發(fā)展加速、大型基礎(chǔ)設(shè)施建設(shè)、精密安裝工程的快速發(fā)展。測量機器人將會產(chǎn)生更廣的應(yīng)用。這其中就主要體現(xiàn)在變形監(jiān)測方面。 一、固定式全自動持續(xù)監(jiān)測方式的系統(tǒng)及實現(xiàn) 1、系統(tǒng)組成 該方式是基于一臺測量機器人的有合作目標(biāo)(照準(zhǔn)棱鏡)的變形監(jiān)測系統(tǒng),可實現(xiàn)全天候的無人值守監(jiān)測,其實質(zhì)為自動極坐標(biāo)測量系統(tǒng),其結(jié)構(gòu)與組成方式。如圖: 圖1:測量機器人變形監(jiān)測系統(tǒng)組成 (1)基站 基站為極坐標(biāo)系統(tǒng)的原點,用來架設(shè)測量機器人,要求有良好的通視條件和牢固穩(wěn)定。 (2)參考點 參考點( 三維坐標(biāo)已知)應(yīng)位于變形區(qū)域之外的穩(wěn)固不動處,點上采用強制對中裝置放置棱鏡,一般應(yīng)有3~4個,要求覆蓋整個變形區(qū)域。參考系除提供方位外,還為數(shù)據(jù)處理提供距離及高差差分基準(zhǔn)。 (3) 目標(biāo)點 均勻地布設(shè)于變形體上能體現(xiàn)區(qū)域變形的部位。 (4) 控制中心 由計算機和監(jiān)測軟件構(gòu)成,通過通信電纜控制測量機器人做全自動變形監(jiān)測,可直接放置在基站上,若要進行長期的無人值守監(jiān)測,應(yīng)建專用機房。 2、軟件功能模塊及軟件實現(xiàn) 主要包括工程管理、系統(tǒng)初始化、學(xué)習(xí)測量、自動測量、數(shù)據(jù)處理、數(shù)據(jù)查詢、成果輸出、工具、幫助等功能模塊。 工程管理:將變形監(jiān)測項目作為一項工程來管理,對應(yīng)一個數(shù)據(jù)庫文件,保存所有該變形監(jiān)測項目的所有數(shù)據(jù),如初始設(shè)置信息、原始觀測值和計算分析成果等。 系統(tǒng)初始化:計算機與測量機器人的串口通訊參數(shù)設(shè)置;測量機器人初始化,如自動目標(biāo)識別、目標(biāo)鎖定、補償器開關(guān)狀態(tài),搜尋范圍、測距模式設(shè)置,距離、角度、溫度、氣壓的單位設(shè)置;測前測量機器人的檢校,如2C互差、指標(biāo)差和自動目標(biāo)識別照準(zhǔn)差等。 學(xué)習(xí)測量:通過初始訓(xùn)練獲取目標(biāo)點概略空間位置信息。 自動測量:按設(shè)計的觀測方案及觀測限差控制測量機器人自動做周期觀測。觀測方案包括總觀測期數(shù)、兩期觀測間隔時間、每期測回數(shù)、是否盤右觀測等。自動觀測中,軟件能自動處理一些異常情況,如超限時,自動判斷并指揮測量機器人按要求重測;若目標(biāo)被擋,軟件會控制測量機器人做三次重測嘗試,不成功則暫時放棄,待其余目標(biāo)觀測完畢再試,若仍不成功則等待一段時間(一般 1/10期間隔)后補測,還不成功則會最終放棄并記錄相應(yīng)說明信息。自動報警用聲音或屏幕提示等方式在測量過程中實現(xiàn)。 數(shù)據(jù)處理:包括對原始觀測值做特殊的距離差分和高差差分處理、目標(biāo)點坐標(biāo)的計算和變形分析。數(shù)據(jù)查詢與成果輸出:查詢和用報表的形式輸出選定時期和目標(biāo)點的觀測、計算和分析成果。 工具:提供自由設(shè)站觀測與計算工具,用來檢查基站的穩(wěn)定性或基站不穩(wěn)的情況下得到基站的精確坐標(biāo)。 二、移動式半自動變形監(jiān)測系統(tǒng)組成與實現(xiàn) 固定式全自動變形監(jiān)測系統(tǒng)可實現(xiàn)全天候的無人值守監(jiān)測,并有高效、全自動、準(zhǔn)確、實時性強等特點。但也有其缺點: (1)沒有多余觀測量,測量的精度隨著距離的增長而顯著地降低,且不易檢查發(fā)現(xiàn)粗差; (2)系統(tǒng)所需的測量機器人、棱鏡、計算機等設(shè)備因長期固定而需采取特殊的措施保護起來; (3)這種方式需要有雄厚的資金做保證,測量機器人等昂貴的儀器設(shè)備只能在一個變形監(jiān)測項目中專用。 移動式半自動變形監(jiān)測系統(tǒng)的作業(yè)與傳統(tǒng)的觀測方法一樣,在各觀測墩上安置整平儀器,輸入測站點號,進行必要的測站設(shè)置,后視之后測量機器人會按照預(yù)置在機內(nèi)的觀測點順序、測回數(shù)、全自動地尋找目標(biāo),精確照準(zhǔn)目標(biāo)、記錄觀測數(shù)據(jù),計算各種限差,做超限重測或等待人工干預(yù)等。完成一個測點的工作之后,人工將儀器搬到下一個施測的點上,重復(fù)上述的工作,直至所有外業(yè)工作完成。這種移動式網(wǎng)觀測模式可大大減輕觀測者的勞動強度,所獲得的成果精度更好。 對于該模式我們采用測量機器人機載半自動外業(yè)觀測軟件加微機自動化數(shù)據(jù)處理軟件共同構(gòu)成測量機器人移動式變形監(jiān)測系統(tǒng)。 1、機載半自動外業(yè)觀測軟件設(shè)計 軟件在Leica公司提供的機載應(yīng)用程序?qū)S瞄_發(fā)語言―GeoBASIC上進行,GeoBASIC能通過簡單地調(diào)用儀器的內(nèi)部庫函數(shù)來使用儀器已有的內(nèi)置功能及菜單。用戶可以很快地開發(fā)出所需要的應(yīng)用程序,并可上載到儀器內(nèi)部存儲器中,與儀器的系統(tǒng)軟件融為一體。 GeoBASIC主要由四個部分組成: GeoBASIC編譯器;GeoBASIC解釋程序;TPS1000仿真器(可在PC機Windows平臺上模擬出儀器面板和一個調(diào)試窗口,用戶可在仿真環(huán)境上直接開發(fā));用戶文檔(包括例子程序和詳細(xì)的函數(shù)調(diào)用說明)。 GeoBASIC提供了大量的功能及系統(tǒng)調(diào)用函數(shù)。GeoBASIC函數(shù)分為標(biāo)準(zhǔn)函數(shù)與系統(tǒng)函數(shù)兩大部分,標(biāo)準(zhǔn)函數(shù)主要是標(biāo)準(zhǔn)BASIC提供的函數(shù);系統(tǒng)函數(shù)主要是與儀器系統(tǒng)相關(guān)的一些函數(shù)。機載半自動外業(yè)觀測軟件主要包括作業(yè)管理、限差設(shè)置、測站設(shè)置、初始觀測、后視定向、水平角自動測量、測回差檢查、距離自動測量、觀測數(shù)據(jù)自動記錄、文件操作功能等功能模塊。其作業(yè)過程為:由儀器PCMCIA卡中的數(shù)據(jù)文件,建立起實際控制網(wǎng)點的概略位置信息,儀器在某個網(wǎng)點上安置好后,首先進行測站設(shè)置,主要包括測站限差、角度及距離測回數(shù)、測站名設(shè)置、天氣狀況、觀測時間等,再后視定向,之后儀器將按機載軟件預(yù)先在此點上設(shè)定的觀測點集、順序以及測回數(shù)依次按規(guī)范要求對觀測目標(biāo)進行邊、角測量、將觀測結(jié)果記錄到全站儀PCMCIA存儲卡的文件中,并及時與相關(guān)規(guī)范的限差自動進行比對,若超差則報警,彈出對話框等待人工干預(yù)。當(dāng)最終取得合格外業(yè)觀測數(shù)據(jù)文件后,該數(shù)據(jù)文件可直接輸入到自動化數(shù)據(jù)處理軟件中。 2、自動化數(shù)據(jù)處理軟件開發(fā) 自動化數(shù)據(jù)處理軟件以Microsoft Visual Basics語言為編程環(huán)境,并采用數(shù)據(jù)庫技術(shù)來存儲與管理各種數(shù)據(jù)。該軟件可將存儲在PCMCIA卡中的各個測站的數(shù)據(jù)導(dǎo)入到一個統(tǒng)一的工程中進行管理;包括對各站數(shù)據(jù)的整理、檢查、測站平差;將合格角度、距離數(shù)據(jù)按規(guī)范規(guī)定的格式以標(biāo)準(zhǔn)外業(yè)手簿的形式自動輸出;當(dāng)整個工程外業(yè)觀測完成后,可直接在軟件中進行網(wǎng)平差計算,也可以外部文件的形式輸出“科傻”系統(tǒng)或清華“山維”接受的平差數(shù)據(jù)文件在“科傻”或清華“山維”軟件中平差。該軟件除具有上述自動化數(shù)據(jù)處理功能外,還移植了機載軟件的所有功能,軟件通過計算機與測量機器人在線通訊的方式完成機載軟件的所有自動觀測、限差檢查、自動記錄等功能。 測量機器人技術(shù)是近年來發(fā)展起來的自動化測量技術(shù),在固定式全自動變形監(jiān)測方面具有高效、快速、省時省力等諸多優(yōu)勢,是測繪行業(yè)發(fā)展的一個熱點方向。而移動式半自動變形監(jiān)測系統(tǒng)則因其采用與傳統(tǒng)的變形監(jiān)測網(wǎng)完全一致的觀測量,但比傳統(tǒng)方式具有高得多的效率。 若需獲得更多資訊,歡迎前往儀商城進行了解 |