|
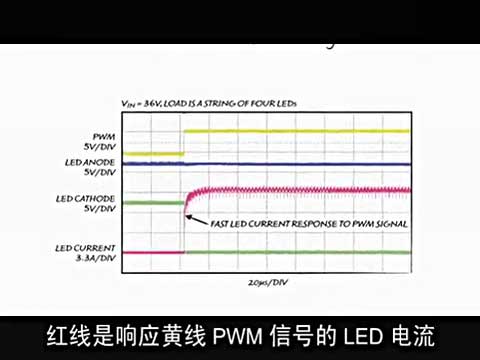
給出一種基于LMDl8245型驅動器的二相步進電機細分驅動器的設計方法.著重介紹LMD-18245的工作原理以及系統的硬件連接和軟件設計。 步進電機在電腦繡花機等紡織機械設備中有著廣泛的應用,這類步進電機的特點是保持轉矩不高,頻繁啟動反應速度快、運轉噪音低、運行平穩、控制性能好、整機成本低。目前用于電腦繡花機的步進電機多數為五相混合式步進電機,目的是通過采用高相數的步進電機來減小步矩角和提高控制精度,但是采用該種方式獲得的性能上的提高是有限的.而且成本也相對較高。采用細分驅動技術可以大大改善步進電機的運行品質,減少轉矩波動,抑制振蕩,降低噪音,提高步矩分辨率。若采用反應式步進電機,在性能明顯提高的同時還能大大降低產品的成本。 筆者采用美國國家半導體公司的LMDl8245型步進電機專用驅動電路設計了一種二相步進電機的細分驅動器。 1 LMDl2845的特點及功能 LMDl2845是二相步進電機專用驅動電路,其全橋功率驅動器集成了雙極性步進電機驅動和控制電流所需的全部電路,并通過相同單穩態結構上的DMOS功率開關在同一器件上構建雙極CMOS控制和電流保護等功能的組合,同時采用創新的電流檢測方式,基本消除了功率損耗。一個LMDl8245能夠驅動一相雙極性步進電機繞組.當其工作電壓達55V時,電流可達3A(峰值為6A),其內置的4位數/模轉換器提供了一種對電機電流的數字化控制,從而簡化了步進電機全步、半步及細分驅動的實現方式,而對于要求更高的細分驅動應用還可以通過外擴DAC來實現。 1.1主要特點 ●工作電壓可達55V,電流在3A連續可調; ●每個功率開關管具有很低的RDS(on)(通常為 0.312); ●內置箝位二極管; ●低損耗電流檢測方式; ●電機電流用數字或模擬控制; OTI"[.及CMOS輸入兼容; ●在Ti=155"C"于自動關斷; ●過流保護; ●消除浪涌電流; ●采用15引腳TO一220封裝。 1.2功能原理 LMDl8245主要由斷路放大器、電流感應放大器、4位DAC、比較器、單穩態及保護電路等部分組成,其功能和連接框圖如圖1所示。下面簡單介紹主要模塊的工作原理。 (1)斷路放大器 斷路放大器通過管理功率橋中的反饋驅動開關來控制和限制電機線圈中的電流。功率橋由4個固態功率開關管(S1,S2,S3,S4)和4個H配置連接的二極管組成,如圖2所示。控制電路檢測電機線圈電流并和門限電流相比較。當電機線圈電流保持在門限電流以下時,橋對面的一個源開關和一個關斷開關使得供電電壓加在線圈上,同時線圈電流快速增加到1/cc/R(R為線圈電阻)。一旦線圈電流超過門限電流,控制電路就關閉關斷開關一個固定的關斷時間。在關斷期間源開關和對面上位二極管將線圈短路,同時線圈電流續流并以指數衰減到零.在關斷時間的最后,控制電路將另一關斷開關打開.并且線圈電流再次快速增加到I/cc/R。重復上述過程可以實現電流浪涌動作,從而將線圈電流限制在門限電流.且只有當線圈電流達到門限電流時浪涌電流才會發生。 (2)數/模轉換器(DAC) DAC的作用是在VOACREFD/16處浪涌設置門限電壓,其中D是與加在M4一M1上的二進制數相等的十進制數,M4是最高位。在要求更高的應用中,外部:DAC能夠驅動DAC REF輸入。DAC REF的最大直流電壓是12V,VDAC REF的合適電壓范圍是0V"5V。 (3)比較器、單穩態及線圈電流浪涌門限 引腳CS OUT上電壓超出DAC的輸出電壓時,比較器觸發單穩態,單穩態一旦被觸發就給控制邏輯提供關斷脈沖。在關斷脈沖期間,功率轎使電機線圈短路,從而引起線圈中的電流續流并衰減到零,通過連接在RC和地之間的一個并行阻容網絡,可將關斷及脈沖時間設置為1.1RC秒。綜上所述不難得出線圈電流約為((VDAC REF D/16)/250%26;#215;10-6%26;#215;RS)時發生浪涌。 2 驅動系統設計 通過以下不同組合方式配置M4-M1端口,LMD18245可以工作在單相運行全步、雙相運行全步、不加轉矩補償的半步驅動、加轉矩補償的半步驅動、1/4細分驅動、1/8細分驅動、1/10細分驅動、1/16細分驅動等驅動方式下。不同驅動方式下。不同驅動方式可以通過調整外部跳線實現,也可以通過在線編程軟件實現。這里介紹最常用的,性能較好的10細分驅動的原理及應用,系統原理圖如圖3所示。該電路主要由一個AT80C2051和二個LMD18245及外圍電路組成。 2.1 系統供電 系統由二路電源供電,一路采用8"12V DC給LM7805供電,輸出5V標準電壓,作為系統的信號電源;由于LM18235F型驅動器的額定輸入電壓最大值為55V DC,因此,當使用超過45V DC的電源時,將會產生由電機減速所帶來的反電動勢,可能會使供電電壓增加并超出55V額定電壓的限制。為加強保護,可放置一個適當的齊納二極管將電壓限制在55V以下,也可在電機供電端接入一個低于2.5A的保險絲。由此可見,用一個標準24V交流變壓器即可,因為經過二極管整流和電容器濾波可以產生接近35V DC的電壓來實現電源供電。該系統采用未穩壓的線性電源。而如果采用開關電源,則要在輸出端放置一個大電容器(10000μF或更大)。 2.2 步進/方向連接 AT89C2051的(T0)P3.4和(T1)P3.5口均定義為GPIO口并分別接二個驅動器的DIR輸入端,P3.4和P3.5的輸出由程序控制。步進電機的實際運轉方向通過改變INT1(P3.3)輸入電平來實現,INT0(P3.2)作為步進脈沖輸入口,步進和方向信號均設置為“低有效”,它們和BREAK信號均來自上位機,有時可能需要光電隔離,并且引腳脈寬至少應為2ms。該系統的最大步進頻率為45kHz,在1/8細分驅動模式下,1.8o步矩角的步進電機轉速可以接近1700rpm。 2.3 BRAKE的連接 LMD18245驅動器的一個設計特點是具有BRAKE(剎車)引腳,是用來關斷步進電機的電源。 該引腳為邏輯高電平時會使能剎車并制動步進電機。正常操作時,BRAKE引腳為低電平或接地。在該系統中,BRAKE引腳接收上位機的信號來實現電機的實時關斷。 2.4 限流電阻的設置 LMDl8245驅動步進電機的電流達到3A/相.最大驅動電流輸出由電阻器R5和R7設置。電流檢測電阻可以采用以下公式計算:R=20000/A(其中R的單位是歐姆,A的單位為安培)。電阻器。R5和R7的典型值如表1所示,要求使用l/4W電阻并且阻值不能低于6.6kΩ。二個LMDl8245型驅動器必須設置為相同的電流輸出門限,R5和R7采用相同的阻值。不要使驅動器的輸出超過3A,否則將會出現問題。若要靈活改變電流輸出,可以采用兩個最大阻值為25kΩ的可變電阻器分別替換R5和R7,但為安全起見,還是建議采用R5和R7。 2.5驅動方式選擇 在不同的步進階段給LMDl8245的M4-M1端口加載一定序列的二進制數可以非常容易地實現二相步進電機全步驅動、半步驅動、1/4細分驅動、1/8細分驅動、l/10細分驅動和l/16細分驅動等驅動方式,可以設置外部的跳線開關給SELl、SEL2、SEL3端口加載不同的值并通過相應的軟件確定具體以何種方式驅動步進電機。 3 驅動系統軟件設計 該系統采用AT89C2051作為主控制器,其指令系統與5l指令集完全兼容。根據二相雙極型步進電機均勻細分時的電流變化規律公式:IA=Im-cosθ,IB=Imsinθ,可以計算出1/10細分驅動時電機中的相電流比及其對應的M4一Ml上的二進制等量數值。將該等量數值用數組表示為: PDAC [40] =fob000011 11,0b001011 11,0bolollll O,0b01111101,…,0b00101111}; 表1 限流電阻及輸出電流門限 R5和R7的阻值/kΩ 輸出電流門限/A 20 1 10 2 8 2.5 6.6 3 PDIR[40]={0b00110000,0b00110000,0b00110000,0b00110000,…,0b00010000 l; 由此得出二相步進電機驅動控制軟件流程如圖4所示,其中初始化設置要定義各端口的功能,設置INT0為邊沿觸發,其余均為GPIO口:初始化電機主要是運行前設置端口的I/O方向,確定所選擇的細分驅動方式,關斷所有線圈電源并記錄正確的步進位置;在中斷服務程序中判斷步進方向并計算步進位置,根據步進位置在數組PDAC[401]及:PDIR[40]中選取正確的值送到AT89c2051的P1和P3口完成一個微步進過程;最后由用戶中止程序運行。 4 結束語 筆者設計的二相步進電機細分驅動器在低頭數電腦繡花機中得到較好的應用,工作過程中運轉噪聲低、運行平穩、控制性能較好、使用方便、整機設計簡潔、價格低廉,是一種性價較高的二相步進電機驅動器。 |