|
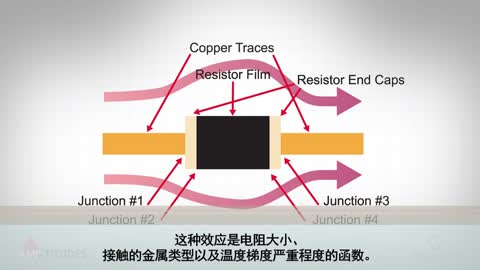
1 ���� �ڻ��ڲ��ұ������m��(y��ng)�A(y��)ʧ���Ŵ����У���С����LMS(1east-mean-square)�㷨�V������������^�c����ʼ�Ք��ٶȡ��r׃ϵ�y(t��ng)��ۙ��������(w��n)�B(t��i)ʧ�{(di��o)�Ǻ������m��(y��ng)�V���㷨��(y��u)�ӵ�����Ҫ���g(sh��)ָ�ˡ�LMS�㷨��ȱ�c���Ք��ٶ������������LMS�㷨���Ք��ٶȣ��īI������M�ăɂ�������ݔ����̖ȥ���P(gu��n)�ͱM���������L����(sh��)������ݔ����̖ȥ���P(gu��n)���棬�о��˷։KLMS�㷨��DCT-LMS�㷨���wһ��LMS�㷨���������L����(sh��)���棬�l(f��)�F(xi��n)�ӎ����m��(y��ng)LMS�㷨��SVSLMS�㷨�����M��SVSLMS�㷨������(j��)��ǰ���о����̶����L�����m��(y��ng)�V���㷨���Ք��ٶȡ��r׃ϵ�y(t��ng)��ۙ�ٶ��c�Ք����ȷ��挦�㷨���L���ӵ�Ҫ�����ì�ܵġ����Q�@һì�ܣ����LMS�㷨�IJ��L�{(di��o)��ԭ�t���ڳ�ʼ�Ք��A�λ�δ֪ϵ�y(t��ng)����(sh��)�l(f��)��׃���r�����L��(y��ng)�^���Ա����^����Ք��ٶȺ͌��r׃ϵ�y(t��ng)�ĸ�ۙ�ٶȣ������㷨�Ք���(y��ng)���ֺ�С�IJ��L���_����С�ķ�(w��n)�B(t��i)ʧ�{(di��o)���� �������о����m��(y��ng)�㷨�Ļ��A(ch��)�ϣ����һ���µ�׃���LLMS�㷨���c��ǰ�㷨���������������㷨�������A(y��)ʧ��Ŵ������沢ȡ������Ч���� 2 ��(sh��)���A(y��)ʧ��Ŵ��� �D1�锵(sh��)���A(y��)ʧ��Ŵ����Ļ����Y(ji��)��(g��u)���A(y��)ʧ�����������ұ������m��(y��ng)�A(y��)ʧ�慢��(sh��)��Ӌ��������ݔ����̖Vout��ݔ����̖Vin��(j��ng)���m��(y��ng)�㷨Ӌ����²��ұ��е�����ϵ��(sh��)��������ϵ��(sh��)�cݔ����̖���˷��\��õ��A(y��)ʧ����̖Vpdһ����ԣ��A(y��)ʧ����Ҫ�a��?sh��)����ɷŴ����Ǿ��Ԏ����ķ��ȷǾ���ʧ�����λ�Ǿ���ʧ�档�A(y��)ʧ������ݔ��ݔ���P(gu��n)ϵ��ʾ�飺 ʽ�У�F(��)���A(y��)ʧ���������溯��(sh��)�� ���ʷŴ�����ݔ���� ʽ�У�G(��)�鹦�ʷŴ��������溯��(sh��)�� ʽ(2)����ʽ(1)���t�У� ��̖��(j��ng)�^���m��(y��ng)�A(y��)ʧ��Ŵ���֮����ݔ���飺 3 ���ұ������m��(y��ng)�㷨 LMS�㷨�У���Rin(n)��ݔ����̖�������P(gu��n)��ꇡ�W(n)����^��(qu��n)��������ô�У� ʽ�У�d(n)��������̖��e(n)��������̖�cݔ����̖���`����̖���̞鲽�L����(sh��)����(n)=��(1-exp(-��|e(n)|2))�� LMS�㷨�Ք��ėl���飺0<��<1����max,��max��ݔ����̖�����P(gu��n)��ꇵ��������ֵ��������M��SVSLMS�㷨���Ķ����LMS�㷨���Ք��ٶȡ� 4 �µ����m��(y��ng)�㷨 �µ����m��(y��ng)�㷨�� ʽ(9)�Ц�(n)Ҫ�M��0<��(n)<1/��max�����ڦ����˞�ָ�������Կ���ԇ��ֶ�ȡ�ã�e(n)��δ֪׃�������ʼֵ�o����Ӌ����������Ҫ�Д��*| e(n)|2/N�Ƿ�С��1/��max�������@�����ӕr�g��(f��)�s�ȣ�����܉�_�J��*| e(n)|2/N<1����max�������һ�ε�����e(n)<1���t��ֱ���O(sh��)������С��1����max��ֵӋ�㣬�Ա�p�ٕr�g��(f��)�s�ȡ� 5 ����Y(ji��)�� ��MATLAB���һ�����m��(y��ng)�A(y��)ʧ��Ŵ�����ģ�ͣ��Ŵ���ʹ��salehģ�͡�ݔ����̖��256QAM��̖���քe��SVSLMS���M���㷨��ԓ���㷨�M�з��挦�ȣ�����SVSLMS���M���㷨�ą���(sh��)ȡֵ���=1����=10��ԓ���㷨����(sh��)ȡֵ���=2��N=5������500�εĽY(ji��)����D2~�D5�����У��D2������Ĺ���ݔ�������D���D3��δ��(j��ng)�A(y��)ʧ�����Ĺ���ݔ�������D���D4�Dz��ø��M��SVSLMS�㷨���A(y��)ʧ��Ŵ�����ݔ�������D���D5�Dz������㷨���A(y��)ʧ��Ŵ�����ݔ�������D��ͨ�^�����֪��ԓ���㷨���A(y��)ʧ��Ŵ����ĸ��M���@��(y��u)��SVSLMS���M���㷨�� 6 �Y(ji��)Փ ���һ���µ�׃���LLMS�㷨��ͨ�^�`���ƽ������(sh��)���Ʋ��L��׃�����кܺõ��Ք����ԣ���MATLAB����A(y��)ʧ��Ŵ����ķ���ϵ�y(t��ng)��������������M��500�ε���Ӌ��rԓ���㷨���A(y��)ʧ��Ŵ����Ǿ������Եĸ��M���@��(y��u)�ڸ��M��SVSLMS�㷨�� |