|
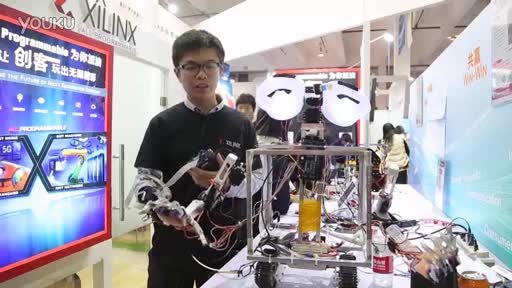
1 引言 遠程康復(fù)是一項現(xiàn)代信息及通信技術(shù)與康復(fù)醫(yī)學相結(jié)合的多學科交叉課題,它可以被定義為:在綜合運用通信、遠程感知、遠程控制、計算機、信息處理等技術(shù)的基礎(chǔ)上,實現(xiàn)的遠方康復(fù)醫(yī)療服務(wù)。 國外在此方面的研究出發(fā)點各有不同,歸納起來,主要是將遠程康復(fù)系統(tǒng)當作一種通信手段,來消除輔助器具評價專家與遠方殘疾人士之間的空間障礙,對如何把遠程康復(fù)系統(tǒng)本身作為一種輔助器具評價診斷系統(tǒng),促進康復(fù)醫(yī)學的發(fā)展等方面,雖有所提及,但尚未作實質(zhì)性研究。國內(nèi)在這方面的產(chǎn)品,僅見深圳殘聯(lián)自行研制開發(fā)的全國第一個殘疾人遠程康復(fù)系統(tǒng)的報導(dǎo),該系統(tǒng)著眼于專家和病人的溝通與交流,使殘疾人在網(wǎng)上可以向?qū)<疫M行康復(fù)咨詢,得到康復(fù)方面的建議。 從目前國內(nèi)外的發(fā)展情況來看,各方的研究都有較大局限,均處在起步階段。因此進行遠程康復(fù)系統(tǒng)的研究具有重要的意義。 遠程康復(fù)系統(tǒng)中,信息采集系統(tǒng)是其主要的組成部分,如何遠距離對信息采集系統(tǒng)進行有效控制,其實現(xiàn)效果的優(yōu)劣,實現(xiàn)速度的快慢,對整個系統(tǒng)的性能起著關(guān)鍵性的作用。由于遠程康復(fù)信息采集系統(tǒng)是多變量、非線性的時變系統(tǒng),很難建立整個同步控制系統(tǒng)的精確數(shù)學模型。因此就需要利用一種有效的控制方法——模糊控制。 2 遠程康復(fù)信息采集控制系統(tǒng)的構(gòu)成 遠程康復(fù)信息采集控制系統(tǒng)示意圖如圖1所示。該系統(tǒng)就是一個輔助攝像用的機器人,它可以接受指令以某條空間曲線為路徑來觀察患者。此控制系統(tǒng)主要由兩個功能模塊來實現(xiàn),一是現(xiàn)場站點的PC機,通過Internet來接收遠方站點的控制命令,經(jīng)過模糊控制算法處理之后,再通過RS 232串口傳給單片機處理系統(tǒng),來控制小車、云臺、攝像機的運動。另外現(xiàn)場站點的PC機還可以將從攝像機采集到的圖像信息根據(jù)要求進行處理,再通過Internet以適當?shù)姆绞匠尸F(xiàn)給遠方站點,供遠方的康復(fù)專家和輔助設(shè)計廠商診斷、設(shè)計之用。二是單片機控制系統(tǒng),主要用來控制小車、云臺、攝像機的運動,使其能夠到達合適的方位,以便遠方康復(fù)專家不受時空限制、實時地觀察患者的身體狀況,進行遠程診斷和評估。單片機控制系統(tǒng)還可以對檢測電機到位等傳感器的信號進行處理,并將控制模糊控制系統(tǒng)執(zhí)行單元的情況反饋給遠方站點。簡單來說,此模糊控制系統(tǒng)主要實現(xiàn)自動控制裝載信息采集裝置的小車、帶動攝像機的云臺和攝像機的運動,根據(jù)要求采集實時視頻或圖像信息,供診斷和輔助產(chǎn)品設(shè)計之用。 3 遠程康復(fù)信息采集系統(tǒng)的模糊控制設(shè)計 3.1 信息采集系統(tǒng)的模糊控制策略 本系統(tǒng)的輸入變量為:小車到目標的轉(zhuǎn)向角,小車到目標的距離,云臺距離目標的高度,攝像機與目標的方向角和距離,一共6個輸入變量。輸出變量為:小車舵電機的運行速度、方向,小車驅(qū)動電機的運行速度、方向,帶動云臺上下運動的電機的運行速度、方向和云臺的四個轉(zhuǎn)向一共10個輸出變量。所以該信息采集系統(tǒng)初步控制對象就有6個輸入變量和10個輸出變量,屬于多輸入一多輸出結(jié)構(gòu)的模糊控制器。 通過模糊解藕將此多輸入一多輸出模糊控制結(jié)構(gòu)轉(zhuǎn)化為單變量模糊控制器來進行設(shè)計。下面以控制小車驅(qū)動電機的速度為例來詳細說明模糊控制規(guī)則的建立。 小車驅(qū)動電機采用步進電機,其速度是通過改變驅(qū)動信號的脈沖頻率來控制的。因此,對小車驅(qū)動電機速度的控制采用單變量二維模糊控制器,輸入量為小車到目標距離的誤差e以及小車到目標距離誤差的變化率ec,輸出變量為控制脈沖的頻率f。在模糊控制的具體實現(xiàn)方法上,采用模糊查表法,其原理如圖2所示。 對每一次采樣得到的誤差e和誤差變化率ec進行量程轉(zhuǎn)換,即乘以比例因子k1和k2,然后進行量化,將輸入的物理信號值轉(zhuǎn)換為輸入論域上的點,就可以通過查詢控制作用表得到輸出控制量。它是輸出論域上的點,再乘以比例因子k3進行量程轉(zhuǎn)換,就得到所需要的控制脈沖頻率值f。控制作用表是輸入論域上的點到輸出論域上的對應(yīng)關(guān)系。它已經(jīng)是經(jīng)過了模糊化、模糊推理和解模糊的過程,可以離線計算得到。查表法結(jié)構(gòu)簡單,實施方便,資源開銷少,在線運行速度快。 誤差e、誤差變化量ec和控制量f的基本模糊子集為{NB(負大偏差),NS(負小偏差),0(零),PS(正小偏差),PB(正大偏差)}。在系統(tǒng)中,小車到目標距離誤差e的論域為E,小車到目標距離誤差變化率ec的論域為EC,輸出控制量f的論域為F。根據(jù)系統(tǒng)的實際狀況,將其大小量化為5個等級,分別為{-3,-1,0,+1,+3),選擇如圖3所示的隸屬函數(shù)曲線,控制器可完成對輸入變量的模糊化。 模糊輸入變量再由模糊控制規(guī)則進行推理決策,得到模糊輸出語言變量{NB(負大),NS(負小),0(零),PS(正小),PB(正大)}。同樣道理,經(jīng)過模糊控制器推理的輸出結(jié)果也必須變換成實際的校正量,調(diào)節(jié)控制小車驅(qū)動電機速度的脈沖頻率,完成對小車速度的控制。 為了簡化編程,便于實時控制,本系統(tǒng)將控制規(guī)則表格化。模糊控制器按表1所示的控制狀態(tài)表進行控制。 誤差E,誤差變化率EC的量化因子k1和k2的選取對控制系統(tǒng)的動態(tài)性能的影響很大。k1決定了系統(tǒng)的響應(yīng)速度,k1越大系統(tǒng)的響應(yīng)越快,但超調(diào)也越大,過渡時間就越長。k2影響系統(tǒng)的超調(diào),k2選取越大,系統(tǒng)的超調(diào)就會越小,但系統(tǒng)的響應(yīng)時間就會越長。k3為模糊控制器的總增益,選取過小會使系統(tǒng)的動態(tài)響應(yīng)過程變長,而選擇過大會導(dǎo)致系統(tǒng)震蕩。 其他控制量的控制規(guī)則和上述小車驅(qū)動電機速度的控制類似。 3.2 信息采集控制系統(tǒng)的軟件設(shè)計 目前,模糊控制器構(gòu)造有三種技術(shù):采用傳統(tǒng)的單片機或微型機作為物理基礎(chǔ),編制相應(yīng)的軟件實現(xiàn)模糊推理和控制;用單片機或集成電路芯片構(gòu)造模糊控制器,利用配置數(shù)據(jù)來確定模糊控制器的結(jié)構(gòu)形式;采用可編程門陣列構(gòu)造模糊控制器。由于遠程康復(fù)系統(tǒng)現(xiàn)場站點需要一臺微機作為接收遠方的控制命令和處理來自攝像機的圖像信息并通過Internet來傳送信息,所以為了充分利用和節(jié)省資源,我們采用微機作為物理基礎(chǔ),編制相應(yīng)的軟件實現(xiàn)模糊推理和控制。 模糊控制的上位機軟件設(shè)計主要就是模糊控制算法的設(shè)計和實現(xiàn),同時也包括微機與單片機的串口通訊部分和與Internet接口部分的設(shè)計實現(xiàn)。其程序流程如圖4所示。 該部分主要實現(xiàn)對信息采集系統(tǒng)的模糊控制功能。系統(tǒng)運行前,該上位機程序首先要進行初始化,設(shè)置串口,為系統(tǒng)正確運行做好準備。當遠程控制命令通過Internet傳送到現(xiàn)場站點的PC機,經(jīng)過模糊控制算法的處理,再經(jīng)串口將命令下達給單片機控制系統(tǒng)來執(zhí)行。此控制過程不需要現(xiàn)場站點的人員來操作,完全采取遠程控制,這樣遠程專家就能很方便地根據(jù)需要控制信息采集系統(tǒng)的運行,同時也方便了現(xiàn)地醫(yī)師或病人家屬,減少了由于遠程專家和現(xiàn)地醫(yī)師或家屬的交流障礙而引起的操作錯誤。 4 結(jié)語 本系統(tǒng)利用模糊控制技術(shù)解決了對遠程康復(fù)信息采集系統(tǒng)的遠程智能控制,使位于遠方的康復(fù)專家和輔助設(shè)計師能夠通過Internet方便地遙控現(xiàn)地的信息采集系統(tǒng)以合適的方式和角度準確、實時地進行數(shù)據(jù)信息的采集,供診斷和輔助產(chǎn)品設(shè)計之用。試驗證明,該控制系統(tǒng)達到了我們的設(shè)計要求,能夠遠程實時地進行三維視覺信息的采集。 |