|
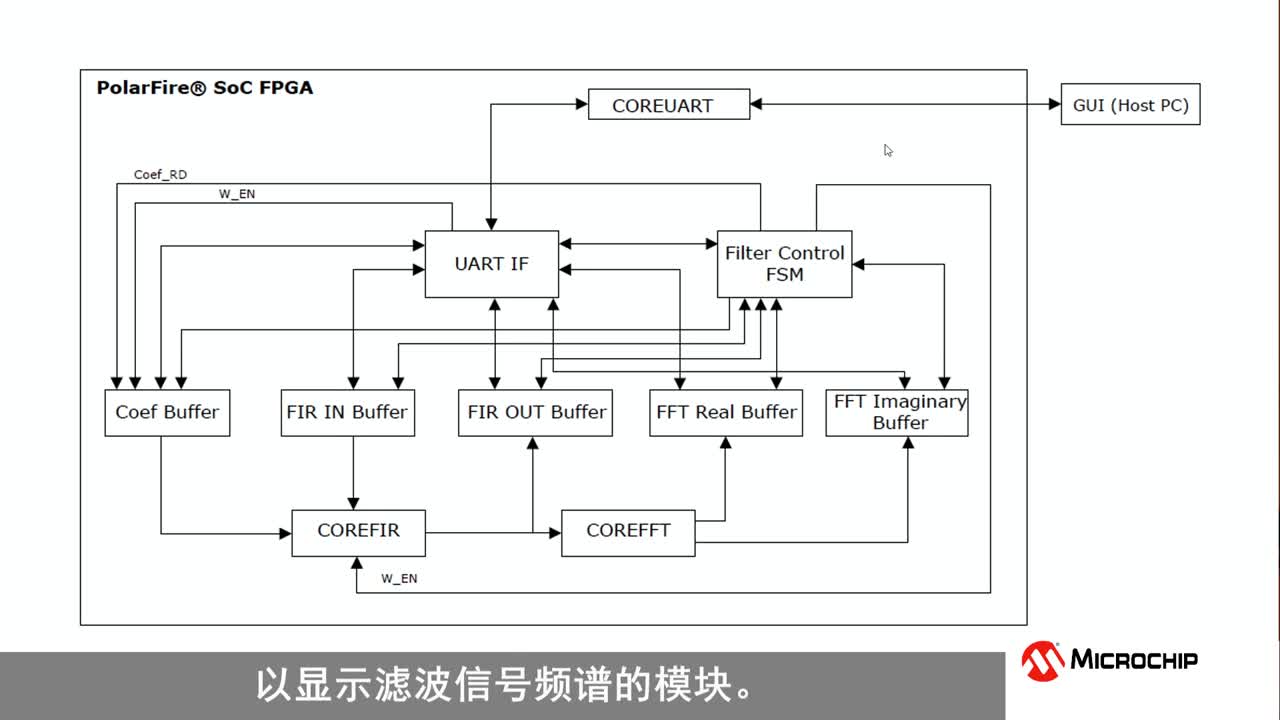
�S�������I(y��)�İl(f��)չ����������������ʹ���н�ͨ����ϵ�y(t��ng)�������@�÷dz���Ҫ���չ��ˆT�������_���ѱ��R�e�ĺ������ṩ���Ʒ��գ����ԏ����_��Ļ�Ͽ����w�C����Ϣ����(sh��)���ں����wϵ�У���Ҏ(gu��)ģʽ��Sģʽ���g���ڱO(ji��n)ҕ���ܣ������ڪ�����ַ���x��ԃ���Ļ��A֮�ϣ���Ϣ���Q��ͨ�^������ԃ�����ݺ����Б��������M���}�_���a���F(xi��n)�����a�����������_�����ģ����ڮa�����Cͬ����̖��ԃ����̖����ˣ����и߃�(y��u)������ԃ���C���a���}�_���a��̖̎�����g���P��Ҫ��ͬ�r�����_��̖̎���Č��r������ˇ����Ҫ���ں��뼉�ĕr�g����Ɍ�������̖��̎�������Ŀ���R�e���o��Ŀ���w��������Ϣ����(sh��)��ͬ�r���O���w�e�����ķ���ć���Ҫ��ʹ��̖̎���O������С�ͻ������ܻ����ɾ��̵�څ�ݰl(f��)չ����Ҫ����̖̎��ϵ�y(t��ng)���и߿ɿ��Ժ�ϵ�y(t��ng)��������Ҫ�� �F(xi��n)���ɾ���߉�����������P���g�Ǯ���������gѸ�ٰl(f��)չ�Įa�FPGA��һ�N����;�����ܶȵĿ��؏;���߉�T��С��c���y(t��ng)���g��ȣ�F(xi��n)PGA���H�����OӋ���㣬�`���У������c�����Դ��s�p�аl(f��)�r�g���p���OӋ�M�ã������OӋ�L�U��ͬ�r����FPGA���g�������������_�@�ؽ���Y�ϵ�ϵ�y(t��ng)�������OӋ�����ܵ����_��̖̎��C�������ϵ�y(t��ng)���ɶȣ��pС�·Ҏ(gu��)ģ���Ķ���߿ɿ��ԣ��oՓ���ٶȡ��w�e���棬߀�����OӋ���`�����϶����m���F(xi��n)�����_��̖̎��ϵ�y(t��ng)��Ҫ�� 1 ���ܶ������_����ԃ�����a���Ĺ���ԭ�� 1��1 ���a���������� ���ܶ������_����վ�հl(f��)ϵ�y(t��ng)�ɾ��a����ԃ���������ՙC�����ֽM�ɡ���D1��ʾ�����a�����������_�����ģ������������ã� (1)�a�����C��ͬ���}�_�������Թ�������ͬ���̓�ͬ���ɷN��ʽ����ͬ���}�_�����ڃ�ͬ���������������_���������r���a���؏��l��f=150��450 Hz�����Cͬ����̖S0�����������_��һ�����_��Ϲ����r����һ�����_�ṩ���Cͬ���|�l(f��)��̖������ͬ���r���������_���؏��l��f2��һ�����_���؏��l�� f1�����µ��Pϵ�� �ٮ�150 Hz��f2��450 Hz�r��f2=f1�� �ڮ�450 Hz�ۮ�900 Hz��Ҏ(gu��)��f2��450 Hz���؏��l�ʵ��x��ȡ�Q�����þ��x�Ĵ�С�� (2)�a�����Nԃ��ģʽ�� �l(f��)��C��ԃ���}�_���{���£��a��1 030 MHz�����l�}�_�������˭h(hu��n)�����͵��쾀���쾀��ͬ���}�_�Ŀ����£���P1��P3�M���ͨ����P2�M���ͨ�������ՙC�ڌ�1 090 MHz�����l������̖�D�Q��ҕ�l��̖�������K���b���M��̎���� 1��2 ���a��ͬ����̖S0�a��ԭ�� ʽ�У�Rlmax�����ԃ�����x����I��ԃ�����l���L��GI��ԃ���쾀���棻GR�鑪���쾀���棻Prmin�鑪�������ՙC�`���ȣ�Pr�����l(f��)��C�İl(f��)�书�ʣ�LI�����˭h(hu��n)����������ϵ�y(t��ng)�p�ģ�LR�鑪�����������档 ԃ�����ڌ���S0ͬ����̖���ڡ��Y�ό��H���̵ą���(sh��)���������湫ʽӋ���ԃ���r�gÿ1��s������ԃ�����x��150 m�ı��������˹������O(ji��n)ҕ�Ķ������_�����þ��x��450 km�r������ԃ�����ڞ�3��5 ms����370 km���ҕr������ԃ�����ڞ�2��5 ms���C���K�˅^(q��)���O(ji��n)ҕ�õ����þ��x��140 km�r������ԃ�����ڞ�0��000 9 ms�� 1��3 ���a��ϵ�y(t��ng)�Y�� �D2��ʾ�龎�a����̖̎����D�����������_�@�ؽ��桢̎������FPGAоƬ��Y�ϵ���̖̎��ϵ�y(t��ng)�����ھ��a�����OӋ��Ҫ���F(xi��n)������������(Ҋ1��1С��(ji��))������IPcore���g��ȡ��������(sh��)��(j��)�ɼ���̎����������÷��l�·�a����ģ�K����ĕr犣�����(j��)ԃ������a��ͬ�����a��̖S0���ɴ˾��a�a����Ҏ(gu��)ģʽ���佻��ģʽ��Sģʽ��ԃ����̖�����Ô�(sh��)��ʾ�����M�Ќ��r�y�������l�M���Ɍ����a��̖�M�Мyԇ���a�����ԙz����̖����A��D�D�Q������ IPcore�ɼ���(sh��)����̖�����ς������涨���@ʾ���Ρ� 2 ���a����ԃ����̖��ʽ 2��1 ��Ҏ(gu��)ģʽ ���Շ��H�M����Ҏ(gu��)�������N��Ҏ(gu��)ԃ��ģʽ���քe�Q��1��2��3��A��B��C��Dģʽ�����Nģʽ��P1�cP2��P1�cP3֮�g�ĕr�g�Pϵ���1��ʾ�� ���У�1��2�ɷNģʽ������܊���R�eԃ����3��Aģʽ����܊�ú������R�eԃ����Cģʽ���ڸ߶�ԃ����Dģʽ�������ԃ��ģʽ����ԃ������Ŀǰ߀�����h֮�С��@Щԃ��ģʽ�����g����ͬ���}�_���M�ɣ���r�g�Pϵ���1��ʾ�����У���һ���}�_�Q��P1���ڶ����}�_�Q��P2���������}�_�Q��P3���}�_P1�� P2��P3��ʽ���}��(O��8��O��1)��s����������1��5 ��s֮�g�����t��0��2��5��s֮�g���}�_P1��P3����ͨ�^ԃ��ͨ����ݔ?sh��)ģ�����֮�g���S��ͬ�ĕr�g�g���� 2��2 Sģʽԃ����̖��ʽ �D3��ʾSģʽԃ����ʽ��ǰ�ɂ��}�_P1��P2���}����0��8��s���g����2��0��s����P2�}�_����һ���L�}�_P6�����ij��m(x��)�ڞ����}����ȡ16�� 25��s����30��25��s���������S����λ�鷴�D�}�_������y���l(f��)�䔵(sh��)��(j��)��P6�����24λ���w�C��ַ����ͨ�^ȫ��ԃ���@�õġ����У���һ������λ���}�_ǰ�غ�1��25��s����P5�顰ͬ����λ���D����̖���ṩ�oSģʽ����������ʼ�Kͬ�����Ķ������m(x��)�Ĕ�(sh��)��(j��)�M�Ќ�����a��ͬ����λ���D�}�_Ҳ����������̖�l(f��)��ĕr犅�����ԃ���Cͨ�^Ӌ��ͬ����λ���D�}�_�İl(f��)���c���յ��ĵ�һ�������}�_֮�g�ĕr�g�g���y���w�C�ľ��x����(sh��)��(j��)ͨ�^DPSK��̖���l(f��)�䷴��λ�õ��g����0��25��s���Ķ��a��4 MHz�Ĕ�(sh��)��(j��)�����ʡ�����(j��)Ҫ�������l(f��)�䔵(sh��)��(j��)�ı��؞�56 b����112 b�� 2��3 Sģʽ��ż�c��ַ SģʽP6��(sh��)��(j��)λ�������ż24 b��Ϣͨ�^���M��ѭ�h(hu��n)����(CRC)���a��Ӌ�㣬����ʽ���£� ��ż���ڰl(f��)���Ӌ�㣬���c24������λ�w�C��ַ���뵽��Ϣ�С��ڽ��նˣ���ż���ٴα�Ӌ�㣬���c��̖�е���ż�͵�ַ��Ϣ�����^���@�ӿ��Դ_����Ϣ�Ƿ�l(f��)�͟o�`�����ʽG(x)�������e�`̽�y�ͼm��������������λ�Ĵ����팍�F(xi��n)�����·��D4��ʾ��ǰ32������λ(���LSģʽ��88������λ)�o�ĵذl(f��)�ͣ�������l(f��)�͕r��������λ�Ĵ��������˳���G(x)���������ѭ�h(hu��n)������̽�y��Ϣ�����24 b�������_������24 b��ַ����λ���档��Y��������Ϣ�����24 b������24 b����ż�^(q��)���c�w�C��ַ����ٳ���G(x)�� 3 ���a���OӋ���� ���a����FPGA�OӋ���̈D��D5��ʾ��������ȡ���_���ƽ���Ŀ�������Д��ԃ��ģʽ��ԃ����ʽ(ԃ�����淽ʽ)���Y��S0�a��ԭ�������_ԃ�����x��Փ����Ӌ��(sh��)���l���a�a��S0ͬ����̖�� ���dz�Ҏ(gu��)ģʽ����S0ͬ����̖���|�l(f��)�£�����ܛ�����ƽ��治ͬ�Ŀ�������քe���a�a�������Ե�6�N��ģʽ(Ҋ��1)ԃ����̖�����Үa����������������ȡ��̖���Y�Ͻ���ģʽ�a�������ľ��a��̖�� ����Sģʽԃ�����OӋ�����ǣ����Ȯa��Sģʽ��ǰ���}�_P1��P2�͔�(sh��)��(j��)λͬ����̖P5��Ȼ���Д��Ƕ�Sģʽ(P5��(sh��)��(j��)λ56 b)��߀���LSģʽ(P6��(sh��)��(j��)λ112 b)�����{��XCV600E�Ȳ����p��RAM IPcoreģ�K�M�Д�(sh��)��(j��)�ɼ�����sģʽ���24 b���w�C��ַ��(sh��)��(j��)λ�M����ż��ַУ�a��У�Ҏ(gu��)�t��D4��ʾ��֮���ٌ�У�Y���M��DPSK�{�ƾ��a��Ȼ����Sģʽ����̖��ʽ���ڔ�(sh��)��(j��)ͬ��λ��̖P5 (Ҋ�D3)�����£��a��Sģʽԃ����̖�� 4 ԃ����̖���������� 4��1 ��Ҏ(gu��)ģʽ1��1��1����ԃ����̖�ķ��沨�� ������ͬ���|�l(f��)��̖S0�Įa���������_�@�ؽ����˹�������׃�������������_�O(ji��n)ҕ�ķ�����ͬ�����в�ͬ�����ڡ�һ��S0��������2��5 ms��3��5 ms��0��000 9 ms �� ��S0�����ڞ�3��5 ms�r�������Y����D6��ʾ��XCV600E��FPGA�r犞�40 MHz���a�������Ե�S0��̖������Ӌ��(sh��)4����8����1O�����l�a����ģ�K����ĕr犡������׃S0�����ڣ�������Ƶķ����a�����������������ԃ��ģʽ�Įa������D6��ʾ����ԃ�����ƽ����У����x6�N��Ҏ(gu��)ģʽ�е�3�N����ͬ�����a��̖S0���������M���|�l(f��)���ڵ�һ��S0���ڃȮa��ԃ��ģʽmode_1���ڶ���S0���ڃȮa��ԃ��ģʽmode_2��������S0���ڃȮa��ԃ��ģʽmode_3 A�����Ă�S0���ڃȮa��ԃ��ģʽmode_1������Ҏ(gu��)�������ԵĮa��������������ԃ��ģʽ�����У�S1_revert��S2_revert�� S3_revert��ѭ�h(hu��n)��B(t��i)�C�a������������ȡ��̖���քe��������ȡmode 1��mode 2��mode 3 A�ľ��a��̖��������ģʽ�ľ��a�a����ʽ��ơ� 4��2 SģʽCRCУ�a���g�a���沨�� ����(j��)Sģʽԃ���C���a����P5λ��ż��ַУ�Ķ��ʽ�·Ҏ(gu��)�t(Ҋ�D4)������Matlabܛ������24��D�|�l(f��)���M�ɵ���λ�Ĵ����M�з��档��D7��ʾ������Y������P5����56 b������data��ԭʼ��P6��(sh��)��(j��)��̖��data�� ��11111111101101010011010100100000011011111101001100001000�����С����У����24 b��ʾ�w�C��ַ(���Ϋ@���w�C��ַ���ɡ�ȫ��ԃ�����@��ԓУ��ǡ��c��ԃ������ʽ)��encode��У�ݔ���������О� ��11111111101101010011010100100000000101101010000100110000����Ȼ���encode����ݔ�밴�Ց�������a�·�M���g�a���g�a�Y����decode���ɴ˰l(f��)�F(xi��n)�g�a�Y���cԭʼݔ�딵(sh��)��(j��)��ͬ�����C��У�a�OӋ�����_�ԡ� 5 �Y �Z ����FPGA�ĸ����\��������IPcore���g�OӋ�����ܵĶ������_����ԃ�����a���������ڔ�(sh��)��(j��)�ɼ�����̖���a�r�������m���ԺͿɿ��ԣ����ҽ�Q�����_��̖�Č��r�Ԇ��}������˶�N���s��̖̎���Ć�ƬF(xi��n)P-GA���ɣ���Ч�ؽ�Q��С�·��ߴ��c��惦���g��ì�ܣ��Ķ������ϵ�y(t��ng)�ļ����ԣ��Mһ����(ji��)�s���YԴ��ͬ�r���á�ܛ���@�ؽ���+FPGA+MCU���Y�ϵļܘ����gʹ֮�����׳ɞ���ϵ�y(t��ng)�� |