|
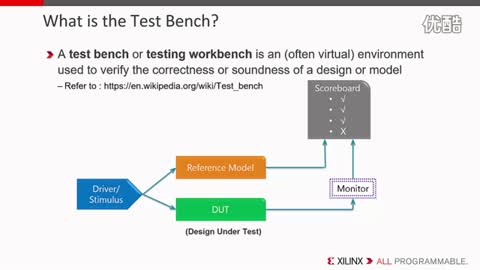
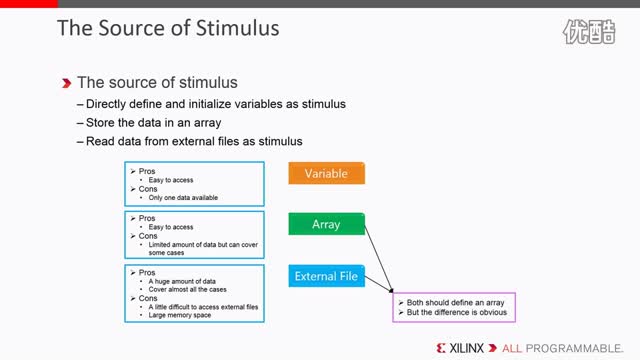
在航天測試中,遙測系統是不可缺少的重要組成部分。它的主要作用是測量導彈、衛星、航天器及武器系統內/外部的環境參數,獲取地面試驗和飛行試驗數據,為故障分析、指揮決策、安全控制和完善設計提供可靠信息和依據。測量綜合控制器是遙測系統的核心,主要包括3部分:接收彈上CAN數據模塊、測量記錄各種傳感器數據模塊和形成PCM碼流模塊。測量綜合控制器的可靠性是影響遙測結果的核心因素,其精度關系到導彈研制和實驗過程中的實驗數據可信度,其性能關系到實驗的成敗。在導彈的研制過程中,要歷經多次試驗,試驗耗資巨大,所以要求測量綜合控制器具有高精度、高可靠性。如何準確、客觀、高效地*價測量綜合控制器的性能,是測量綜合控制器生產中的重要環節。測量綜合控制器測試系統是集信號自動發生、自動檢測、自動計量和數據分析于一體的大型應用系統,是專門針對測量綜合控制器檢測的測試系統。 本測試平臺是測試系統中的一個分系統,主要研究如何通過PXI總線實現多種傳感器信號的模擬和PCM碼流的持續無丟幀存儲技術。 1 系統設計 如圖1所示,系統通過PXI總線與上位機進行通信,本地總線與PXI總線通過PCI接口電路連接。系統有2種工作模式:自檢模式和正常工作模式。在自檢模式下,系統通過硬件連接把SAR和GNSS信號接收回來,且內部模擬一個測量綜合控制器上的PCM碼源,再將回讀后的數據在上位機上顯示。 2 PXI總線及接口電路的實現 PXI是PCI在儀器領域的擴展,它將Compact-PCI規范定義的PCI總線技術發展成適用于試驗、測量與數據采集場合的機械、電氣和軟件的規范,從而形成新的儀器體系結構。PXI將PC的高性價比優勢和PCI總線向儀器領域擴展的需求完美結合起來,它通過增加用于多板同步的觸發總線和參考時鐘、用于精確定時的星型觸發總線以及用于相鄰模塊間高速通信的局部總線來滿足用戶的測試要求。 2.1 PXI總線的讀寫 在一個PXI總線的應用系統中,如果某設備取得了總線控制權,就稱其為“主設備”;而被主設備選中進行通信的設備稱為“從設備”或“目標設備”。PXI總線有2種操作模式: (1)正常模式:地址和數據交替使用AD總線。首先發送的是地址信號,接著就是數據的讀寫。正常模式1次傳輸過程需要2"3個時鐘周期(地址周期+寫周期;地址周期+讀周期+讀周期)。對1個32位寬的數據總線,最大寫數據傳輸速度只有66 MB/s,而最大的讀數據傳輸速度只有44 MB/s。 (2)突發模式:在這種模式下,主設備首先發出1個起始地址,接著是一系列隱含著地址(地址順序增量)的數據信號。這樣傳輸的如果是具有連續地址的內存塊,對1個32位寬的數據總線,數據傳輸速度最高可達到133 MB/s(32位)或是266 MB/s(64位)。 本系統采用的是突發讀寫模式,圖2為32位PXI總線在突發模式下的時序圖。 在時序圖的第1個時鐘周期中,主控設備把地址放到AD總線上,把對目標設備的命令放到C/BE#(命令1字節選通)引腳上。C/BE#引腳上的狀態標識了PXI不同種類的命令,PXI總線的操作主要體現在PXI總線命令上。總線命令出現在PXI地址期的C/BE[3::0]線上,總線命令的作用是用來規定主、從設備之間的傳輸類型。由圖2可見,第1個數據傳輸需3個時鐘周期,其后每個時鐘完成相應的1個數據傳輸。 2.2 PXI總線接口實現 接口電路的功能是實現本地總線信號和PXI(PCI)總線信號之間的轉換,所以接口電路的基本功能是完成讀寫操作控制邏輯的轉換。目前PXI總線的接口方案主要有2種:使用可編程邏輯器件和使用專用總線接口器件。 (1)可編程邏輯器件實現:對于設計者來說,并不需要實現規范中的所有功能,而采用可編程邏輯器件就可以靈活地選擇自己所需的功能。PXI總線對負載和傳輸數據的時間要求都比較苛刻,同時還需要器件內部實現配置各類寄存器,而且要實現比較復雜的應用,需要開發者對協議有深刻的了解。因此,用可編程邏輯器件方案難度較大,開發時間長,不適合小批量生產。 (2)專用PCI接口芯片+FPGA實現:專用PCI接口芯片的缺點是靈活性比較差,但其支持PCI協議,可以減少開發時間,提高效率。FPGA用來實現PXI總線所要完成的觸發總線、局部總線等功能。本設計采用的就是接口芯片的方案。 PXI接口電路利用PCI9054芯片構造PCI接口。PCI9054由PCI總線接口邏輯、本地總線接口邏輯、內部邏輯和EEPROM接口邏輯組成。本地接口邏輯由可編程邏輯器件實現,包括地址/數據信號、I/O讀寫信號、存儲器讀寫控制信號以及等待周期產生邏輯和總線控制邏輯等。串行EEPROM采用93CS56芯片,在EEPROM中,按順序存儲接口卡最重要的配置信息。將板卡連接到PXI插槽后,在系統上電時,PCI9054首先檢查到EEPROM,然后按照EEPROM中的值配置其內部寄存器。圖3是PCI9054寄存器的配置信息。 PCI9054有3種工作模式:M、C、J。M模式適用于與Motorola的RISC處理器(MPC850和MPC860)無縫連接使用,所以在使用其他種類的處理器時,就要使用C或者J模式。在本項目中采用局部數據總線16位、地址數據不復用的方式,所以選擇C工作模式。PCI9054的C模式又支持3種數據直接傳輸方式:直接主模式、直接從模式、DMA方式。因為系統主要利用PXI總線向計算機傳送數據和讀取計算機配置命令,且計算機是PXI總線上的主設備,所以PC19054采用直接從模式的方式。 3 功能電路的設計 3.1 信號源的設計 3.1.1 GNSS信號源的設計 測量綜合控制器測試臺中,GNSS信號源模擬GNSS接收機。信號源的準確性有利于測量綜合控制器性能的測量。測量綜合控制器GNSS模塊在每幀的開始利用幀同步脈沖向GNSS接收機發出取數請求信號,GNSS接收機接到請求后,在8 ms內向遙測設備傳送完1 000 bit(125 B,先傳高位)的測量參數后,遙測設備必須在下一個取數信號到來之前將數據傳輸完。其接口電路如圖4所示。 3.1.2 SAR信號源的設計 測量綜合控制器測試臺中SAR信號源模擬的是SAR壓縮器,采用標準RS-422-A接口形式傳輸壓縮后的圖像數據(每字節8位的串行數據)。測量綜合控制器每隔25 ms向測試系統發送取數請求信號,在取數請求由高變為低延遲一段時間后,測量綜合控制器同時向測試臺發送移位脈沖,測試臺根據取數請求信號以及移位脈沖信號,向測量綜合控制器發送相應的數據信息,其接口電路如圖5所示。 3.2 PCM碼設計 系統采用的是一種典型的96×64的含有主、副幀結構的PCM碼流。測量綜合控制器發出的PCM碼數據信號是由CAN總線發送的數據,對64路模擬信號實時采集的數據,由GNSS與星SAR信號組成。系統中的PCM碼流采用的是運算放大器輸方式(±2.5 V方式)[4-5]。 3.2.1 PCM解碼 如圖6所示,系統首先通過AD8138將PCM數據轉換成幅值為0"5 V的電平(AD8138還有反相的功能)。為了將差分信號轉換為FPGA能夠處理的TTL電平,并且保證信號被有效隔離和再次反相,采用光電耦合器來接收差分信號。DC-DC實現了電源隔離,這樣系統能夠有效地實現與測量綜合控制器的隔離,從而消除傳輸干擾帶來的誤差。 雖然對信號進行了隔離,PCM輸入信號仍不可避免地存在各種干擾,這將影響碼同步脈沖和PCM數據的提取,因此,在FPGA內PCM信號的輸入端接入1個濾波模塊。模塊使用的是高精度時鐘,頻率是PCM碼率的20倍(39.321 6 MHz)。PCM碼(PCM-IN)在產生跳變后必須保持至少5個clk,才能被濾波模塊輸出(PCM-OUT),否則被認為是干擾信號,將被濾除。 因為±2.5 V方式只包含數據流,因此實時同步時鐘的產生是解碼的關鍵,也是串行傳輸要解決的主要問題。PCM同步傳輸是以固定的節拍發送數據信號的,而且信號以恒定的速率(系統采用的是1.966 08 MHz)傳送數據,因此在數據流中各碼元之間的相對位置是固定的。FPGA為了從轉換后的TTL電平串行數據中正確區分出信號碼元,必須先建立起準確的時鐘信號,即同步時鐘。從而使得發送方和接收方同步工作,即位同步。本設計中碼同步信號通過對clk的20分頻和對濾波后的PCM碼的提取得到。在副幀同步的邏輯設計中,采用了容錯設計方法,即每1個副幀都判斷副幀或幀同步標志。具體方法是:先找到1個EB 90或14 6F,然后每隔96個字節再判斷1次移位的數據是不是EB 90或14 6F,若不是,則重新查找;若是,則認為它們是副幀或幀同步標志,每1個副幀都進行判斷。這樣查找的好處是:即使第1次誤判,也不會影響后續的判斷正確性;即使PCM碼發送中斷后再重發,或由于干擾發送錯誤,也不會影響后續的正確解調。這種循環判斷副幀或幀同步標志的方法,增強了PCM碼解調過程的容錯、糾錯能力。PCM解碼程序框圖如圖7所示。 3.2.2 PCM編碼 如圖8所示為PCM編碼電路,REF03通過調理電路輸出2.5 V和-2.5 V電壓。MAX4649是一個單刀雙擲開關,FPGA控制PCMCLK信號來決定輸出的PCM碼流。 本設計實現了信號源和PCM無丟幀編碼、解碼的設計,并通過PXI總線與上位機進行通信。此方案已經成功應用于某型號飛行器的地面測試臺中,經過測試和調試,系統工作穩定,無丟幀現象,達到了設計要求。 |