|
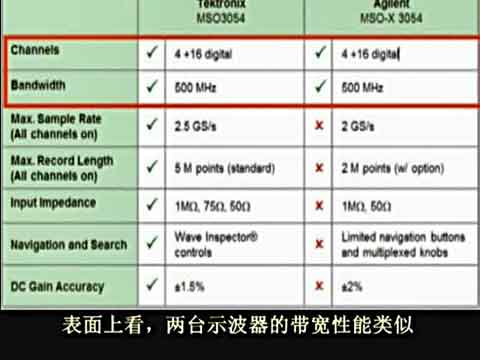
1 引言 氣門是汽車發動機的重要零部件,是控制氣缸吸入混合氣或排出廢氣的閥門,形狀呈菌形、平項,頭部外緣做成圓錐面與氣門座相配合。氣門質量的好壞直接影響著發動機的動力和油耗。隨著汽車行業的迅速發展,對氣門品種和數量的需求愈來愈多,同時對質量要求也越來越高。 目前氣門的生產毛坯成型工藝主要有兩種:擠壓成型法和電熱鐓粗法。對比擠壓成型法,電熱鐓粗法投資少,節能高效,是國內氣門毛坯的主要生產方式,如圖1所示為氣門棒料、氣門鐓件和氣門半成品。電熱鐓粗工藝是利用工件本身的電阻,在通以低電壓大電流同時對其施加外力,當工件被加熱到塑性變形溫度時逐漸被鐓粗的過程。 2 嵌入式智能電鐓控制系統的設計 2.1 電鐓控制系統結構 電鐓機控制系統主要是實現電熱鐓粗工作過程中電流、壓力和上下料的控制。嵌入式智能電鐓機控制系統的硬件設計主要采用以ARM7微處理器為核心的硬件平臺,系統結構如圖2所示。 控制器根據預設參數,通過總線驅動D/A控制鐓粗頂鍛壓力、鐓粗電流、砧子回退的速度。位移和溫度等參數由傳感器讀取,經過比較計算之后再經總線輸出,實現閉環控制。自動上下料機械手的控制使用光電隔離分隔電磁閥與核心板電信號,提高抗干擾能力;鐓粗過程中的狀態和參數分別通過信號指示燈和LCD屏監控顯示;同時LCD觸摸屏還具有參數輸入和調試控制功能。 2.2 電鐓系統控制流程 電鐓工藝是根據朔性力學和傳熱學原理,利用工件本身的電阻,通過控制加載在工件上的電流和壓力,使工件通電發熱,當工件被加熱到塑性變形溫度時逐漸被鐓粗成型。在嵌入式智能電鐓機上,還設計有自動上下料機械手,實現電鐓過程的連續自動生產。設計中,將電鐓控制過程分為:上料,預熱,上料復位,熱鐓,上料準備,熱鐓結束,熱鐓復位,下料等過程。 在這些過程中,動作之間的協調配合不但可以提高生產效率,而且還可以提高加工質量。采用嵌入式實時操作系統,可以大大優化工作過程中各動作的協調配合。μC/OS-II是一種可剝奪內核的實時多任務操作系統,具有良好的實時性能和多任務功能,結構小巧、執行效率高、占用空間小。在μC/OS-Ⅱ操作系統上,將控制流程中的一些加工步驟并行觸發,使加工流程更加緊湊高效,有助于提高電鐓生產效率。 2.3 核心控制電路 核心控制電路是嵌入式硬件的最小系統,存儲操作系統、應用軟件及提供硬件運行平臺。在核心控制系統中主要是采用ARM微處理器作為主控制器,電鐓機的控制軟件和工藝參數文件保存在2MB的NorFlash中,控制程序在8MB的SDRAM中執行。RS232通信接口用于PC機下載程序和反饋硬件平臺的調試信息。JTAG是微處理器配置的調試接口,可以使用仿真器通過JTAG接口對硬件平臺進行仿真調試;同時,JTAG接口還可以實現Nor Flash程序固化功能。微處理器芯片已經提供了LCD控制器,因此不需要外接控制器,使用方便。數據總線輸出壓力、速度、電壓等數據信號量,要經過總線驅動器保證數據的傳輸無誤。AD輸入經電平轉換后直接輸入到處理器上。 2.4 基于μC/OS—II的控制系統設計 嵌入式智能電鐓控制系統在ARM7內核的S3C4480微處理器上移植了μC/OS-II,并開發了電鐓控制系統應用程序。整個控制系統分為6個任務:上料,下料,鐓粗缸,砧子缸,變壓器,人機界面。各任務優先級從高到低如下分配:砧子缸8,鐓粗缸12,變壓器14,上料16,下料20,人機界面24。任務間通過預先創建的信號量進行任務切換。為了保證控制位移的實時采集,位移傳感器信號以中斷方式輸入。 人機界面在移植到S3C4480的μC/GUI基礎上設計。由于S3C4480有LCD控制器,所以在移植μC/GUI時,只需要移植μC/GUI驅動層9個函數。 LCD_L0_Init(); 初始化顯示屏并清屏; LCD_L0_Rinit(); 重新初始化顯示屏,不清屏; LCD_L0_Off(); 關閉LCD; LCD_L0_On(); 開啟LCD; LCD_L0_DrawBitmap();畫位圖; LCD_L0_DrawHLine();繪水平線; LCD_L0_DrawVLine();繪垂直線; LCD_L0_FillRect(); 矩形填充框: LCD_L0_XorPixel; 反轉一個像素點: 移植完成以后,就可以直接在μC/GUI應用層上設計人機界面。通過其提供的窗口管理控件,為電鐓控制系統設計了主界面、參數設置界面、調試界面等窗口。在各窗口下,根據功能設置的不同,分別創建了l~4個子窗口。重繪函數通過LCD觸摸屏或者時鐘信號激活,發送信號量后,由系統調度刷新LCD顯示屏。人機界面簡單方便,操作設計人性化。 3 電鐓機控制特性分析 3.1 電鐓常見缺陷 氣門毛坯成型過程中,由于各方面的參數影響,會出現不同類型的廢品,主要缺陷有:頭部有裂紋、頂部出現折疊、成型歪斜不均勻。 當毛坯成形時棒料過熱、變形量大,在附加拉應力的作用下產生軸向裂紋。折疊產生原因是始鐓溫度與終鐓溫度相差較大,金屬*結合不好,有明顯的分界線,形成臺階狀的折疊。而成型歪斜是由于砧子塊棒料接觸電阻相差懸殊,造成兩邊電流不均勻,棒料過多地流向溫度高的一側,引起歪斜。 從上面分析可見,常見缺陷成因主要可以歸結為:壓力不穩定,電流不均勻,驅動系統有時滯性。 3.2 氣液結合驅動 電鐓機振動本身是復雜的非線性系統,無法獲得精確的數值解,為建立電鐓機的振動力學模型,在此做如下假設: (1)將電鐓機機身、工件、砧子缸看作剛性質量塊;忽略電鐓機連接及驅動部件之間的間隙對電鐓機振動的影響。 (2)將電鐓機機身及鐓粗缸等效為線性彈簧。 (3)只考慮電鐓機縱向方向的振動。 由工程振動理論知:振動系統受到激勵發生的振動,是由有阻尼自由振動與穩態振動組成的。如圖3所示為電鐓機等效彈簧一質量系統簡圖,k為彈簧剛度,c為粘性阻尼系數,F為一階躍激勵,所謂階躍激勵就是受到常力F的突然作用,即F(t)=F。 系統的運動微分方程為: 阻尼比ξ的大小可以用來表示振幅衰減的快慢,阻尼比越大,振幅的衰減越快;阻尼比越小,則超調量越大。由于液壓缸彈簧剛度k值遠大于氣缸k值,故液壓缸系統阻尼比小于氣缸系統阻尼比,可以判斷在同樣階躍激勵作用下,液壓系統振動更厲害。 在嵌入式智能電鐓機上,選擇了氣液結合驅動。氣液聯合驅動是指以壓縮空氣為動力源,通過氣液轉換元件將氣體動力轉換成液體動力的驅動方式。在本系統中,采用氣液聯動驅動砧子塊,鐓粗缸采用直接氣體動力驅動。圖4是在鐓粗缸換向時,壓力傳感器測得的壓力振動曲線示波器截圖。液壓驅動式鐓粗缸振動幅值比氣體驅動大25倍,振蕩次數超過10次。實驗證明,氣液結合驅動系統壓力穩定性好。 4 模糊自整定PID控制策略 電鐓控制系統屬于非線性時滯系統,涉及溫度、壓力、電流等參數的控制。用常規的PID控制器,難以達到較好的效果。模糊PID是將模糊控制與經典PID控制相結合的控制器,適用毛非線性、數學模型不確定的系統。 模糊自整定PID是在PID算法的基礎上,通過計算當前系統誤差e和誤差變化ec,利用模糊規則進行模糊推理,查詢模糊矩陣表進行參數調整。模糊控制設計的核心問題是總結設計人員的技術知識和實際操作經驗,建立合適的模糊規則表,得到針對kD、ki、kd三個參數分別整定的模糊控制表。kp、ki、kd的模糊規則表建立后,再應用模糊合成推理設計PID參數的模糊矩陣表,查出修正參數帶入下式計算: 在線運行過程中,控制系統通過對模糊邏輯規則的結果處理、查表和運算,完成對PID參數在線自校正。 在電鐓控制系統中,分別有電流、壓力、速度三個控制參數;以壓力為例來說明。在初始階段,由于棒料加熱溫度沒達到形變要求,形變較慢。在熱鐓階段,溫度已到達要求,形變較快。所以,可通過檢測溫度實時值,來控制壓力輸出。把經驗所得的溫度和壓力對應表作為模糊集。溫度作為控制器的輸入量,經過模糊矢量化后輸入給PID控制器,最終得到PID輸出量后,轉換位壓力控制量輸出給氣壓比例閥實現壓力控制。系統框圖如圖5所示。 5 結語 嵌入式智能電鐓機采用ARM7微處理器為核心的控制平臺,實現了電鐓加工過程的自動控制。基于μC/OS-II操作系統設計的控制軟件,人機界面簡單方便,操作人性化。選用模糊PID控制策略,克服了系統的非線性和時滯性問題,魯棒性大大增強。本系統經某汽配廠電鐓現場使用表明,提高了氣門生產自動化程度,有助于提高工廠的經濟效益。 |