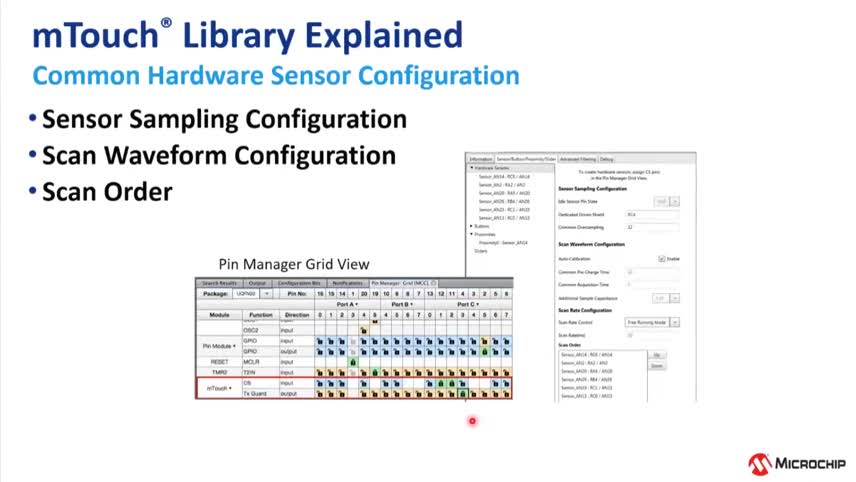
|
CD/DVD����������X�����L(f��ng)�ȵ����I(y��)�C(j��)е�Լ�������τ�(d��ng)����܇��������Segway늄�(d��ng)����܇���S������늄�(d��ng)����܇������(q��)��(d��ng)������܇����Q�顰늄�(d��ng)����܇�����ڃ�(n��i)��늄�(d��ng)��ͨ���ߣ��oˢֱ��늄�(d��ng)�C(j��)���ڸ��N�I(l��ng)����ȡ������ʽ늄�(d��ng)�C(j��)����������?c��)���Խ�ռ����e���ځ��ޣ��@�ӵġ���(g��)���\(y��n)ݔ�O(sh��)�䡱�����������L�˾�ĝ����Ј�(ch��ng)�����ҿ��������ڽ���ȫ�����Դ���ġ� ��ʹ�����Ј�(ch��ng)Ҳ�@ʾ�˲���늄�(d��ng)����܇�Ŀ����ԡ���2000��8���ԁ����ɼ������၆��ʥ����˹�Ŀh�^(q��)�����\(y��n)ݔί�T��(hu��)�Y����һ�(xi��ng)���(d��ng)��(du��)����ُ�I늄�(d��ng)����܇���Բ����˿��Ecology Action�M(j��n)�е�һ�(xi��ng)�{(di��o)���@ʾ��62%�Ļ��(d��ng)���c�ߏ�ֻ�{�γ˿͵���܇�D(zhu��n)׃?y��u)�ƽ��ÿ���T늄�(d��ng)����܇���24��28Ӣ� �M���@�N��r�����Ǫ�(d��)һ�o���ģ������f����늄�(d��ng)����܇�Č�(sh��)���Ժ�Ч�������Ӝp�ق�(g��)����܇�ọ́����M(j��n)���p�ٽ�ͨ��D��ͣ܇��(ch��ng)�����Լ��՚���Ⱦ�ġ�������@�N��(j��ng)�(y��n)������(g��)�����ƏV��Ӱ푿��ܕ�(hu��)�dz�����(j��)�h(hu��n)�����o(h��)�ֵ��f�������������˂�ÿ���s�M(j��n)��9�|����܇���У�����һ��·������5Ӣ�����ֻ���d��һλ�˿͡� 늄�(d��ng)����܇���� ������늄�(d��ng)����܇ͨ�^��늳ع�늵ğoˢֱ��늄�(d��ng)�C(j��)���(q��)��(d��ng)��������������O(sh��)�䣨ECU���M(j��n)�п��ơ��oˢֱ��늄�(d��ng)�C(j��)֮�����ܚgӭ������?y��n)������\(y��n)�D(zhu��n)�졢�o����Ч�ʸߣ�����չʾ�˱�����ʽ늄�(d��ng)�C(j��)���L�Ĺ����������oˢֱ��늄�(d��ng)�C(j��)�Ђ��͵����غ�늄�(d��ng)�C(j��)�ߴ�ı�ֵ������늄�(d��ng)�C(j��)Ҫ�ߣ��@ʹ�������dz��m���ڌ�(du��)�w�e/����Ҫ����^�ߵđ�(y��ng)�á� �oˢֱ��늄�(d��ng)�C(j��)����Ҫ�Ļ���MCU�Ŀ�����ͨ�������ڑ�(y��ng)�õ�Ҫ���dz�Ҋ������������늄�(d��ng)����܇�Ŀ��Ɔ�Ԫ���@�(xi��ng)��(y��ng)�ò��H��Ҫ������(sh��)С�����Ҍ�(du��)�ɱ���Ҫ��Ҳ�e�ߡ� ������늄�(d��ng)����܇���O(sh��)Ӌ(j��)���Ǻ�(ji��n)�εġ����ĺ�݆�������oˢֱ��늄�(d��ng)�C(j��)�(q��)��(d��ng)���~������ͨ���ڎװ��ߡ�늳ص�늉�ͨ����36V����48V����ECU�����ˎ���������b�ã���Ҋ�D1��������MCU��늄�(d��ng)�C(j��)��׃�����ض������������ϙz�y(c��)��SMPS�Լ�I/O���@Щ����b��ͨ������������Ƭ��С�Ć�Ԫ��(n��i)�����Ҍ�(du��)�����ܺ��������кܸߵ�Ҫ���@Щ�����O(sh��)Ӌ(j��)��������S���y�}�� �O(sh��)Ӌ(j��)�y�} �ɱ������ԡ������(sh��)���Լ����w���ܵ��y�}����ͨ�^ʹ�ù���(qi��ng)�r(ji��)�������8λ����������Q�����磬Ӣ�w�蹫˾��XC866��ECU�O(sh��)Ӌ(j��)�ˆT��(y��ng)��(d��ng)����ÿ��(g��)�C(j��)�����ڃɂ�(g��)�r(sh��)犵�����(qi��ng)��8051оƬ�������ǘ�(bi��o)��(zh��n)��12�������ṩ�˸���(qi��ng)��Ӌ(j��)��Ч�ʣ�����Ĉ�(zh��)���ٶ��Լ�����(qi��ng)�����r(sh��)����ʣ����ң����������^�͵ľ����ٶ��������ͬ�Ĺ������ڲ��������ܵ���r�½�����Դ���ġ� �����m��(y��ng)늄�(d��ng)�C(j��)���Ƶ��㷨��Ƕ��ʽ�W���С��Ҫ�������4��16KB֮�g��MCU��늄�(d��ng)�C(j��)�������O(sh��)���ܰ���һ�K�}���{(di��o)���·��ͨ�^�����A(y��)�������Ԅ�(d��ng)��(zh��)���΄�(w��)�IJ��@/���^��Ԫ��CCU���팍(sh��)�F(xi��n)���������ڜpС���a��С�Լ�CPU��ؓ(f��)�ɡ����⣬CCU�����B�ӵ�8ͨ��10λADC���ṩӲ���¼��(q��)��(d��ng)���|�l(f��)�����ṩ�o횂������Ŀ��ƹ��ܡ� 늄�(d��ng)����܇���Ɔ�Ԫ�(q��)��(d��ng)�����oˢֱ��늄�(d��ng)�C(j��) �o�������Ϳ��� �o�������͵Ŀ�����Ҫ��ͳɱ��߿ɿ��Եđ�(y��ng)�����Ǻ���Ҫ�ģ�������늄�(d��ng)����܇�Լ���¶�ڑ�����Ȼ�h(hu��n)���͇�(y��n)���ض�֮�е�������(y��ng)�á��oˢֱ��늄�(d��ng)�C(j��)��(y��ng)���г��õ������������dz��������@Щ���ص�Ӱ푣������L�ڱ�¶���@�N�h(hu��n)���Е�(hu��)ʹ�ɿ������@���͡� ���ǣ��ڿ��]�D(zhu��n)�Q���o��������BLDC늄�(d��ng)�C(j��)���ƕr(sh��)���O(sh��)Ӌ(j��)�ˆT���R�����ʹ�o��������ϵ�y(t��ng)�M����Ҫ������ˮƽ���y�}���c�@һ�c(di��n)���������P(gu��n)ϵ���dž���(d��ng)늄�(d��ng)�C(j��)����?y��n)�o�������Ϳ����ǻ��ڷ�늄�(d��ng)��(sh��)�ģ�����늄�(d��ng)��(sh��)ֻ����늄�(d��ng)�C(j��)���D(zhu��n)�ĕr(sh��)��Ŵ��ڡ� ��(du��)�ڎ����_�ŵ�늄�(d��ng)����܇���ԣ��@��(g��)���}������(y��n)�أ���?y��n)��T܇�˿�����늄�(d��ng)�C(j��)�_(d��)����Ҫ���ٶ�֮���ټ�����ӿ��ơ������ڛ]���_�ŵ�늄�(d��ng)����܇�У����Ҫ����Ϩ���B(t��i)����(d��ng)늄�(d��ng)�C(j��)���㷨�� �����y���A(y��)֪����r�����y(t��ng)�ď�(qi��ng)�ȓQ������(d��ng)�k��ͨ�����m���ڟo������ϵ�y(t��ng)�����������ͨ����(hu��)ʹ�ýY(ji��)�ώ��(xi��ng)���g(sh��)�ķ����톢��(d��ng)늄�(d��ng)�C(j��)�����磬��?y��n)��چ��?d��ng)늄�(d��ng)�C(j��)֮ǰ��֪���D(zhu��n)�ӵ�λ�ã����Կ���ʹ���A(y��)�O(sh��)��λ���_���D(zhu��n)�ӵ�λ�û��ߌ��D(zhu��n)�ӷ��ڴ_����λ�á� һ���D(zhu��n)��λ�چ���(d��ng)λ�ã�������늄�(d��ng)�C(j��)��(y��ng)�ü��ٱ�����̽�y(c��)��늄�(d��ng)��(sh��)���^���c(di��n)��Ϣ�����������̽�y(c��)���A(y��)����(sh��)�����^���c(di��n)�¼������Ϳ����ГQ���Ԅ�(d��ng)�Q��ģʽ���@��Ҫ��(zh��)�д������㷨�� ���]���� ��Щ��(y��ng)�õ�����Ҫ���(hu��)��Ҫ�õ��\(y��n)��(d��ng)�����������@�N��r�£�����Ҫ��Сܛ���_�N�ēQ��ģʽ��(n��i)����CCU���Ƿdz��Ў����ġ� ��һ�(xi��ng)��Ҫ�Ŀ��]�Ǐķ�늄�(d��ng)��(sh��)̽�y(c��)���ߏ�ͬ��ʧ���л֏�(f��)���������@Щ���ܕ�(hu��)�l(f��)���������ϵK��֮�����r�¡�ͬ�ӣ����˽�Q�@��(g��)�y�}����Ҫʹ�ýY(ji��)���㷨���@ʹ���������Ŀ������ͳɞ�һ�(xi��ng)��Ҫ�����ء�ͨ�^���Թ��������O(sh��)�Ј�(zh��)�бM���ܶ���΄�(w��)��MCU���Ԝp�pCPU��ؓ(f��)��(d��n)���p����Ҫ�Ĵ��a���g���@���߶���(hu��)�a(ch��n)�����;á�����(ji��)ʡ�ɱ����O(sh��)Ӌ(j��)�� �oՓ�ǎ���߀�Ǜ]�Ђ��������O(sh��)Ӌ(j��)��������ͨ�^PWM��(sh��)�F(xi��n)���N�����Ρ��Q���������(q��)��(d��ng)BLDC�������ΓQ�������У��������ͨ�^ÿ��ʹ��һ��(du��)늄�(d��ng)�C(j��)���Ӂ����Ƶģ���늄�(d��ng)�C(j��)�ĵ�����(g��)������늚��Ͽ����c�Դ���_�ģ�Ҳ�����f��������o���ĕr(sh��)�g��ֻʹ���������еă��࣬���������Ǒҿյġ� �ڡ���˥׃���{(di��o)�Ʒ����У���PWM�P(gu��n)�]�ĕr(sh��)��(n��i)��ؓ(f��)�d��������ڵײ��_�P(gu��n)���w���O��֮�g��ͨ�� �෴���ڡ���˥׃�������У�PWM�P(gu��n)�]�r(sh��)��(n��i)���е��_�P(gu��n)�������_�������@�N�������ڸ�ؓ(f��)�d�������ȱ�ݡ����ˏ��a(b��)�@�Nȱ�ݣ�����ʹ��ͬ��������ؓ(f��)�d������_�P(gu��n)��������ͨ�����������w����С��@��Ҫͬ�r(sh��)�{(di��o)��ͬһ��(g��)늘��픲��͵ײ��_�P(gu��n)�������H�H��픲��_�P(gu��n)�� ���ǣ����֔(j��n)�����Ա����D(zhu��n)�Q���g�����ֱͨ��·��ͨ�^���·�ГQ�^���в���oЧ�r(sh��)�g�������ͨ�^�w���O�ܡ������ڟoЧ�r(sh��)�g֮����������^�ײ��_�P(gu��n)�����ͬ�������������ڿ�˥׃����(du��)��ʹ�÷����������������ǎ��Ѓ�(n��i)�ñ��o(h��)�·�ļ����(q��)��(d��ng)���ĵͳɱ��O(sh��)Ӌ(j��)���ԣ���MCU��PWM�п���ʹ������ģʽ�����P(gu��n)��Ҫ�ġ����@Щģʽ���ϙz�y(c��)���������ܽY(ji��)��ʹ�ã����Ԟ������׃���(q��)��(d��ng)�ṩ�ߌӴεı��o(h��)���ܡ� ���O(sh��)Ӌ(j��)���㷨���_�l(f��)���֮����������Ҫ�_���Լ���֪�R(sh��)�a(ch��n)��(qu��n)�ܵ����o(h��)���@����ͨ�^��ֹ�o�ڙ�(qu��n)�@ȡ���a������܁팍(sh��)�F(xi��n)���@һ�c(di��n)�Ƿdz���Ҫ�ģ���?y��n)�늄?d��ng)����܇�(q��)��(d��ng)��������(du��)��ͨ���(q��)��(d��ng)�Y(ji��)��(g��u)�M�ɵģ��a(ch��n)Ʒ֮�g��Ҫ�IJ�e����ܛ���� |