|
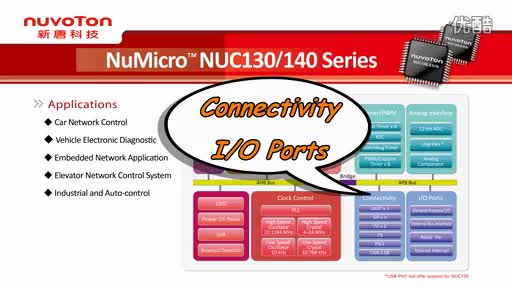
一 前言 隨著計算機技術、通訊技術、集成電路技術的飛速發展,以全數字式現場總線技術為代表現場控制儀表、設備大量應用,使得傳統的現場控制技術及現場控制設備發生了巨大的變化。繁瑣的現場連線被單一、簡潔的現場總線網絡所替代,系統設計靈活、設備維護簡單,信號傳輸質量也大幅提高。 電子技術的飛速發展及在工程機械上的廣泛應用,使得工程機械的智能化程度越來越高,特別是在控制器技術被引入工程機械控制領域后,給工程機械的發展帶來了劃時代的變化,工程機械的操作便利性、安全性、燃油經濟性都得到了大幅提高。 然而,電子設備的大量使用,必然導致車身布線越來越長愈來愈復雜,運行可靠性降低、故障維修難度增大,特別是電子控制單元的大量引入,為了提高信號的利用率,要求人批的數據信息能在不同的控制單元中共享,大量的控制信號也需要實時交換,傳統線束已遠遠不能滿足這種需求。在這種情況下,將串行通訊總線系統引入可以有效解決上述問題。基于上述原因,博世公司開發了控制器局域網(CAN),并獲得了國際標準化組織的認可及許多半導體器件制造商、網絡系統開發商的支持。現在它已經被廣泛地應用于汽車、工程機械和工業現場控制,實踐證明CAN網絡是一種性能優異的現場網絡。 CAN總線技術的引入徹底改變了工程機械控制領域的面貌,分布式控制系統完全取代了集中式控制系統,在眾多具有CAN功能的控制器、傳感器和執行器的支持下,繁瑣的現場連線被單一、簡潔的現場總線網絡所替代,系統設計更加靈活、信號傳輸質量也大幅提高。 眾多的國際知名公司早在80年代初就積極致力于工程機械及汽車局域網的應用及研究。進入90年代,這些曰趨成熟的技術在國外已廣泛地應用于工程機械領域。為縮短與國際先進水平的差距,研究和開發自己的工程機械局域網系統勢在必行。 二 CAN的技術特征 1 CAN的物理特性 1.1 拓撲結構CAN在物理結構上屬于總線式通信網絡。 1.2 機械參數及傳輸介質模塊通過一個9針的D型插頭連接到CAN總線上。總線采用屏蔽的或非屏蔽的雙絞線,用光纖更佳。 1.3 電氣參數及信號表示總線上的數據采用不歸零編碼方式(NRZ),可具有兩種互補的邏輯值之一:顯性及隱性。CAN總線中各節點使用相同的位速率。它的每位時間由同步段、傳播段、相位緩沖段1及相位緩沖段2組成。發送器在同步段前改變輸出的位數值,接受器在兩個相位緩沖段間采樣輸入位值,而兩個相位緩沖段長度可自由調節,以保證采樣的可靠性。另外,CAN總線采用時鐘同步技術來保證通訊的同步。 2 CAN協議 CAN總線以報文為單位進行信息交換,報文中含有標示符(ID),它既描述了數據的含義又表明了報文的優先權。CAN總線上的各個協點都可主動發送數據。當同時有兩個或兩個以上的節點發送報文時,CAN控制器采用ID進行仲裁。ID控制節點對總線的訪問。發送具有最高優先權報文的節點獲得總線的使用權,其他節點自動停止發送,總線空閑后,這些節點將自動重發報文。 2.1 CAN協議分層結構CAN總線規范規定了任意兩個節點之間的兼容性。包括電氣特件利數據解釋協議。 CAN協議可分為:目標層、傳送層、物理層。其中目標層和傳送層包括了ISO/OSI定義的數據鏈路的所有功能。目標層的功能包括:確認要發送的信息;位應用層提供接口。傳送層功能包括:數據幀組織:總線仲裁:檢錯、錯誤報告、錯誤處理。 2.2 CAN通信協議CAN支持四類信息幀類型。 (1)數據幀 CAN協議有兩種數據幀類型標準2.0A和標準2.0B。 兩者本質的不同在于ID的長度不同。在2.0A類型中,ID的長度為l l位;在2.0B類型中ID為29位。一個信息震中包括7個主要的域: 幀起始域——標志數據幀的開始,由一個顯性位組成。 仲裁域——內容由標示符和遠程傳輸請求位(RTR)組成,RTR用以表明此信息幀是數據幀還是不包含任何數據的遠地請求幀。當2.0A的數據幀和2.0B的數據幀必須在同一條總線上傳輸時,首先判斷其優先權,如果ID相同,則非擴展數據幀的優先權高于擴展數據幀。 控制域——r0、r1是保留位,作為擴展位,DLC表示一幀中數據字節的數目。 數據域——包含0~8字節的數據。 校驗域——檢驗位錯用的循環冗余校驗域,共15位。 應答域——包括應答位和應答分隔符。正確接收到有效報文的接收站在應答期間將總線值為顯性電平。 幀結束——由七位隱性電平組成。 (2)遠程幀 接受數據的節點可通過發遠程幀請求源節點發送數據。它由6個域組成:幀起始、仲裁域、控制域、校驗域、應答域、幀結束。 (3)錯誤指示幀 由錯誤標志和錯誤分界兩個域組成。接收節點發現總線上的報文有誤時,將自動發出“活動錯誤標志”其他節點檢測到活動錯誤標志后發送“錯誤認可標志”。 (4)超載幀 由超載標志和超載分隔符組成。超載幀只能在一個幀結束后開始。當接收方接收下一幀之前,需要過多的時間處理當前的數據,或在幀問空隙域檢測到顯性電平時,則導致發送超載幀。 (5)幀間空隙 位于數據幀和遠地幀與前面的信息幀之間,由幀間空隙和總線空閑狀態組成。幀間空隙是必要的,在此期間,CAN不進行新的幀發送,為的是CAN控制器在下次信息傳遞前有時間進行內部處理操作。當總線空閑時CAN控制器方可發送數據。 2.3 錯誤檢驗 為了提高抗干擾能力和數據的可靠性,采取了多種錯誤檢測手段:發送監視、填充監視、CRC錯、格式錯、應答錯誤等。 2.4 總線訪問控制要做到數據的實時處理,數據的高速傳輸是關鍵。對于工程機械中的具體節點而言,不僅需要高達1Mbit/s的通信速率,更需要在幾個節點要競爭訪問總線時正確定位哪個節點獲得使用權。總線上的各種數據的延遲要求是不一樣的,快速變化的物理量(如發送機的轉速、路面的隨機波動信號等)比慢時變的物理量(如溫度、壓力等信號)要求訪問總線的頻率大的多。當多個節點同時需要訪問總線時,CAN控制器通過各種報文被賦予的優先權標示符及ID數的大小來仲裁誰先發送。 3 CAN總線技術的應用特點及支持器件 (一)CAN總線技術的應用特點 1.CAN網絡上任何一節點均可作為主結點主動地與其他節點交換數據,大大提高系統的性能。 2.CAN網絡節點的信息幀可分出優先級,且單幀字節長度短,有很好的實時性。 3.CAN的物理層及數據鏈路層采用獨特的設計技術,使其在抗干擾,錯誤監測能力等方面的性能均超過其他總線。 4.CAN的通信速率相當高。當網絡線的長度不超過40米時,其通信速率可達1Mbit/s。 5.CAN總線每幀數據都含有CRC校驗及其他校驗措施,數據出錯率低。 6 CAN總線節點在嚴重錯誤的情況下,可自動切斷與總線的通信聯系,以使總線上的其他操作不受影響。 (二)CAN總線技術的支持器件 CAN總線自問世以來,由于具有眾多獨特的優點,得到廣泛的應用,而且受到眾多的半導體廠商的支持。目前生產支持CAN協議器件的公司有INTEL、MOTOROLA、PHILIPS、SIEMENS、NEC、HONEYWELL等百余家國際著名公司。其應用器件琳瑯滿目、層出不窮,已經形成產品系列。 目前市場上比較常見的有INTEL的CCU3010E、;MISUBISHI的37630;MOTOROLA的MC68HC05XX/MC68376;SIMENS的C505C、C167CR;NEC的78K/0;PHILIPS的80592/98、XA-C3;TEXAS INSTRUMENTS的TMS370E08D55等控制器件及外圍傳感器及執行器件。 三 CAN在工程機械中的應用 CAN由于具有良好的運行特性、極高的可靠性和獨特的設計,不但特別適合現代工程機械及汽車各電子單元之間的互連通訊,而且日益受到其他業界的歡迎,并被公認為最有發展前途的現場總線之一。 在眾多半導體廠商的支持下,國際上一些著名的工程機械大公司如CAT、VOLVO、利勃海爾等都在自己的產品上廣泛采用CAN總線技術來提高產品的技術檔次及可靠性。下面就CAN總線在半主動油氣懸架加以說明。 在工程機械半主動變阻尼油氣懸架控制中,利用CAN網絡作為懸架之間交換信息的通道,變集中控制為分布式控制,大大地簡化了線束及器件的布置,提高了可靠性。 4個節點的優先權按降序排列依次為:右前輪——左前輪——右后輪——左后輪。數據幀包含三字節數據,其中兩個字節為非懸架質量加速度,一個字節為可調阻尼器的相對開度值。通訊速率為300 kbit/s。實際應用結果表明網絡運行良好,懸架的減震達到預期要求,而且在諸如啟動、急剎車、急轉彎等特殊工況下,通過網絡的合理調度,提高了車輛的抗俯仰、側傾的能力,改善了操縱的穩定性。 四、結束語 隨著電子技術和大規模集成電路的迅速發展,網絡控制芯片性能逐步提高,體積逐步減小,價格進一步降低,為工程機械局域網技術的普及推廣創造了良好的條件。智能芯片價格的下降使得工程機械局域網的成本相差無幾,性能成為影響網絡選擇的主要因素。CAN以其優異的品質具有明顯的優勢,越發受到業界的歡迎。CAN總線在工程機械上的廣泛應用將使工程機械的控制性能、動力性、操縱穩定性、安全性、燃油經濟性都上升到一個新的高度,給工程機械技術的發展注入新的活力。 |