|
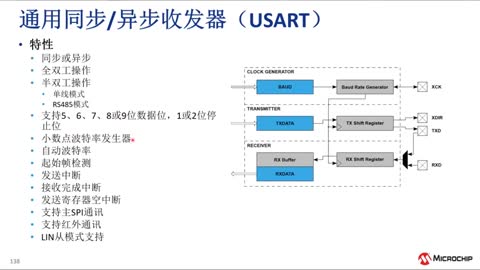
����1 ���� �����C(j��)������(j��ng)ِ�ǽ����Ѹ���_չ������һ�N��(du��)�����(d��ng)�����漰�˹����ܡ��C(j��)е������������������ܙC(j��)е���T���I(l��ng)��ͨ�^��(j��ng)ِ�������B(y��ng)�W(xu��)���Ą�(chu��ng)�����R(sh��)����(d��ng)���������F(tu��n)�(du��)���������ȡ����М���ِ���_չ������V��Ӱ����ęC(j��)���˸�(j��ng)ِ�(xi��ng)Ŀ֮һ�� ������ِҎ(gu��)�t��ģ�������������T��𣬙C(j��)���ˏ�H�c(di��n)���l(f��)�����Ă�(g��)���g��(n��i)��������[�ŵ�Ϟ�T�������O(sh��)������������ِ��(ch��ng)�صĉ��ڸ�33cm�����|(zh��)��ľ�壬�ɫ���ɫ���ߴ���D1��ʾ����(du��)�ڱ�ِ���õķ�Խ�ͳɿ�(j��)?c��)��á�������?j��)�x���ģʽ��ͬ��Ӌ(j��)�֕r(sh��)Ҫ��������(y��ng)��ϵ��(sh��)�� ���� ����2 ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��) ����2.1 ϵ�y(t��ng)���w�O(sh��)Ӌ(j��) ����ϵ�y(t��ng)��ATmega32��Ƭ�C(j��)����ģ�����һ�N��������(qi��ng)RISC�Y(ji��)��(g��u)�ġ����ĵ�8λ��Ƭ�C(j��)�������c(di��n)�飺��Ƭ��(n��i)����32K�ֹ�(ji��)�Ŀɾ���Flash;2K�ֹ�(ji��)��Ƭ��(n��i)SRAM��(sh��)��(j��)�惦(ch��)��;1024��(g��)�ֹ�(ji��)Ƭ��(n��i)�ھ��ɾ���EEPROM��(sh��)��(j��)�惦(ch��)������Ƭ��(n��i)��JTAG�ӿڡ�������ӿڡ��ɂ�(g��)���зքe��(d��)�������O(sh��)���A(y��)���l����8λ���r(sh��)��/Ӌ(j��)��(sh��)��;һ��(g��)16λ���r(sh��)��/Ӌ(j��)��(sh��)��;�Ă�(g��)ͨ����PWMݔ��;8·10λADC;32��(g��)�ɾ��̵�I/O�ڡ��ܵ��ģ���߹����l�ʞ�16MHz�� ��������(j��)����ِ��Ҏ(gu��)�tҪ��������ײ���������ҶȂ�����������?zh��n)������?a href="http://m.qingdxww.cn/keyword/�t��" target="_blank" class="relatedlink">�t����������ͨ�^��·PWM���ƃ�ֻ늙C(j��)���(q��)��(d��ng)���C(j��)���ˣ�����һ·���늙C(j��)��I/O��ͨ�^��������ֱ���(q��)��(d��ng)�� ���� ����2.2 ϵ�y(t��ng)�Դ���� ����ϵ�y(t��ng)���Æ��Դ����·�r(sh��)���^��(ji��n)�Σ����ǿ��]��늄�(d��ng)�C(j��)����(d��ng)˲�g����ܴ�(hu��)����Դ늉�����(w��n)��Ӱ푆�Ƭ�C(j��)��ݔ���·�����ķ�(w��n)���ԺͿɿ��ԣ���˲����p�Դ��늷�������늙C(j��)�Դ�͆�Ƭ�C(j��)�Դ��ȫ���x����Ƭ�C(j��)�Լ��������·ʹ��8V��늣�늄�(d��ng)�C(j��)ʹ��12V��늡����늄�(d��ng)�C(j��)�Ĺ��늉���������ߙC(j��)���˵��\(y��n)���ٶȣ��Ķ�������ߜ��ijɿ�(j��)�� ����2.3 늙C(j��)�(q��)��(d��ng)���� �����C(j��)������Ҫ������һ��(g��)���m���ٶ����ڜ����^���м�Ҫ���^����ٶ��ҵ���Դ����Ҫ��ֹ��?y��n)���ײ��Ӱ푱�ِ�ijɿ?j��)��С܇���ٶ����Ƀ�ֱֻ��늙C(j��)���ơ� L298�(q��)��(d��ng)оƬ�����܃�(y��u)Խ��С��ֱ��늙C(j��)�(q��)��(d��ng)оƬ֮һ�����ɱ��Á��(q��)��(d��ng)�ɂ�(g��)ֱ��늙C(j��)�������p�O�����M(j��n)늙C(j��)����6��46V��늉��£������ṩ2A���~�������L298߀���^���Ԅ�(d��ng)�P(gu��n)��ܣ����з�������z�y(c��)���ܡ��鱣�CL298�������������h���bƬ���m(x��)�����O������ATmega32��Ƭ�C(j��)ֱ��ݔ����· PWM�(q��)��(d��ng)L298N����׃PWM�{(di��o)���}�_ռ�ձȣ����Ԍ�(sh��)�F(xi��n)���_�{(di��o)�١��}�_�l�ʌ�(du��)늙C(j��)�D(zhu��n)����Ӱ푣��}�_�l�ʸ��B�m(x��)�Ժã�����ؓ(f��)�d������;�}�_�l�ʵ̈́t��֮��ͨ�^PD2��PD3�ɸ�I/O�ھ�������늙C(j��)���D(zhu��n)��(d��ng)���� ���� ����2.4 ���������� ��������ِ��Ҫ�C(j��)�����ڱM������ײ���ڵĻ��A(ch��)�ϱM���ܿ���ҵ�Ϟ�T����������������΄�(w��)���^����������Ҫ����ײ���ڣ�Ȼ����Ҫ�Д�ǰ���Ƿ��л��档���ҵ��������Ҫ�Д�Ϟ�T��߅�İ��������ײ���ڵ�Ԓ����Ҫ�C(j��)�����ܙz�y(c��)�������M(j��n)��̎������Ȼ�͕�(hu��)�l(f��)���C(j��)���˿�������r���ǾͲ�������κ��΄�(w��)�� �����D5��ʾ��t��������İl(f��)��ͽ����·���t����ܲ����}���{(di��o)��(PWM)�(q��)��(d��ng)��������38KHz���l���£��p�ٰl(f��)���·�Ĺ��ġ��}�_�l(f��)������NE555��(g��u)�ɣ�ͨ�^�ⲿ���λ��R1���{(di��o)��(ji��)ռ�ձȺ��}�_�l�ʣ����ڼt�����۲���Ҋ�������·�м���һ��(g��)LEDָʾ���ָʾ�t��l(f��)����Ƿ��ڹ�����ԓLED�ͼt��l(f��)��ܴ�(li��n)����(d��ng)�t��l(f��)������������r(sh��)��ԓLED����(hu��)�c(di��n)���������·�������T�ӹ�˾���a(ch��n)�ļt�⌣�ü��ɽ���оƬSFH506-38����ֻ�н��յ�38KHZ���}�_���r(sh��)�ŕ�(hu��)���á�����(n��i)���������x�(xi��ng)���V�����Ŵ��·����(du��)��ֻ��3��(g��)���_�����_����̖(h��o)ݔ����;���_��ӵض�;���_���Դ�ˣ�����ʹ�������dz����㣬Ч�����^���롣 ���� �����ҶȂ�������ģ�M����������һֻ�l(f��)����O����һֻ������������b��ͬһ���ϡ��ҶȂ��������ò�ͬ�ɫ�ęz�y(c��)�挦(du��)��ķ���̶Ȳ�ͬ��������茦(du��)��ͬ�z�y(c��)�淵�صĹ�����ֵҲ��ͬ��ԭ���M(j��n)���ɫ��\�z�y(c��)�� ���� ��������?zh��n)�������ģ�M�������������üt��������Ԫ����(du��)�t����̖(h��o)��(qi��ng)�ȵęz�y(c��)�������D(zhu��n)�Q��C(j��)���˿����R(sh��)�e����̖(h��o)���Ķ���z�y(c��)������̖(h��o)������?zh��n)����������Á�̽�y(c��)���L(zh��ng)��700nm~1000nm������(n��i)�ļt�⾀��̽�y(c��)�ǶȞ�60o;�����мt�⾀���L(zh��ng)��880nm�����r(sh��)�����`�����_(d��)����� ������ײ������ʹ����ײ�_�P(gu��n)��ͨ�^I/O�ڿ�ֱ�����锵(sh��)����ݔ�롣 ����2.5 LCD�@ʾ�������· ����Һ���@ʾ���������ġ��w�eС���@ʾ��(n��i)���S���������p�ɵ��T����(y��u)�c(di��n)��������ʽ�x���͵��đ�(y��ng)��ϵ�y(t��ng)�еõ�Խ��Խ�V���đ�(y��ng)�á��@�����2��16��(g��)�ֵ�DM-162Һ��ģ�K��ͨ�^�c��Ƭ�C(j��)�B�ӡ����̣�����@ʾ���ܡ� ���� ����3 ���C(j��)����ܛ���O(sh��)Ӌ(j��) ������(ch��ng)�ص��Ă�(g��)���g��(n��i)���κεط����п��ܔ[��Ϟ�T�����ԙC(j��)���˱���܉�?q��)��F(xi��n)�������еķ��g�����������ߵ��^���в����S��ײ���ڡ��ҵ���Դ��ͨ�^����b��Ѹ�ٌ�����������(j��)���ϵ�Ҫ���O(sh��)Ӌ(j��)�C(j��)���˵Ĝ��߉��D8��ʾ�� ���� �����C(j��)���˲���������Ҏ(gu��)�t��������Ҏ(gu��)�t��ָ�C(j��)����ʼ�K��������ĉ������ߣ�һֱ����ȫ�̡������ߵ��^���а������c(di��n)��һ̖(h��o)���g����̖(h��o)���g����̖(h��o)���g����̖(h��o)���g�����������Դ����𡣙C(j��)���������xȡ��������Ϣ��Ȼ��(du��)����������Ϣ�M(j��n)���Дࡣ����l(f��)�F(xi��n)��Դ���t�M(j��n)�����ӳ���ԓ�ӳ������څ�⡢���ȹ��ܡ� ����4 �Y(ji��)Փ �������ĸ���(j��)����ِҎ(gu��)�t��Ҫ���چ�Ƭ�C(j��)��������ԭ������AVR��Ƭ�C(j��)ATmega32����ƺ��ģ�С��ֱ��늙C(j��)�����(q��)��(d��ng)Ԫ�����O(sh��)Ӌ(j��)��һ�N�r(ji��)���������(ji��n)�Ό�(sh��)�õĜ��C(j��)���ˡ�ͨ�^��(ji��n)�ε��ģ����Ԍ��˙C(j��)�������������ĸ�(j��ng)ِ�(xi��ng)Ŀ�� |