|
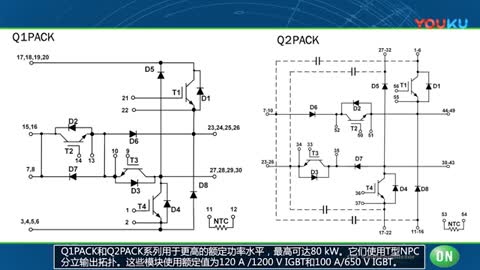
���c��λ��(Neutral Point Clamped)���ƽ��׃����A��Nabae������1980���IAS���h��������@�N��?f��)�Y(ji��)��(g��u)���кܶ���(y��u)�c�����磺 1)�����͉��^�͵��������F(xi��n)�߉�ݔ���� 2)�c���y(t��ng)���ƽ��׃����ȣ�ͨ�^�ƽ��(sh��)�����ӣ�������ݔ��늉����Σ� 3)dv�ڣ�df�����^С���Ķ��������b�õ�EMI���ԡ� ���䃞(y��u)Խ�����ܣ��ڸ߉����ʈ��ϵõ��ˏV���đ�(y��ng)�á� �����ƽ��׃��ϵ�y(t��ng)�У����ܸ߉�������Ĺ����������_�P(gu��n)�^�̕��a(ch��n)���^�ߵ�dv��dt��di��dt,����ϵ�y(t��ng)��(n��i)����(qi��ng)���̖�c�����̖���棬ģ�M�·�c��(sh��)���·���棬�ӵ��cPCB��������(d��ng)���Լ��o���Դ�IJ���(w��n)������ϵ�y(t��ng)��(n��i)���a(ch��n)���ɔ_������ϵ�y(t��ng)���늾W(w��ng)�c�܇�늴ŭh(hu��n)����Ӱ�Ҳ����ϵ�y(t��ng)�a(ch��n)��늴Ÿɔ_����(d��o)��ϵ�y(t��ng)�o�������������������EMC�O(sh��)Ӌ���P(gu��n)��Ҫ�� ���Ľo���˻���DSP�cCPLD��(sh��)�ֿ���ϵ�y(t��ng)�����O����λ���ƽ��׃����ϵ�y(t��ng)�O(sh��)Ӌ���������c������ϵ�y(t��ng)�O(sh��)Ӌ�е�늴ż��݆��}����ᘌ��@Щ���}���քe��Ӳ����ܛ���ɷ����������Ч�Ľ�Q������ 1 ���ƽ��׃��ϵ�y(t��ng)�c����ԭ�� �D1�o�������ƽ��׃��ϵ�y(t��ng)��D��ϵ�y(t��ng)�����ײ��ֽM�ɣ��������·������DSPTMS320LF2407��CPLD XC95144XL�Ĕ�(sh��)�ֿ���ϵ�y(t��ng)���ɘ��·���(q��)�ӱ��o(h��)�·���o���Դ��PC�C(j��)�����У����O����λ���ƽ��׃����D2��ʾ�� ÿ����۲���һ��1200V��100A��IGBTģ�K��(li��n)��ģ�K��(n��i)���m(x��)�����O�ܣ�����2200V��100A�Ķ��O��ģ�K�M(j��n)����λ���ɘ��·����׃��ݔ��늉��������ֱ��ĸ��늉��ɘӣ�����DSP��(n��i)���Ԏ���A��D�D(zhu��n)�Q���M(j��n)��ģ��(sh��)�D(zhu��n)�Q��������ܛ������DSPݔ��PWM��̖����CPLD��(n��i)����߉�����^(q��)̎�����(q��)�ӱ��o(h��)�·���Ձ���CPLD��12·PWM��̖���(q��)��IGBT������IGBT��·���^���r����FAULT���o(h��)��̖����DSP�����iPWM��̖�� ���O(sh��)�Dl��ֱ����(c��)�ɂ��������������늉���ȣ�����Vdr��2���tA�����ݔ��늉�(��0�c�酢���c)�c�_�P(gu��n)��B(t��i)���P(gu��n)ϵ���1���У�(����1��ʾ�_�P(gu��n)��ͨ��O��ʾ�_�P(gu��n)���_)����Ҋÿ�������ݔ��+Vdr��2��O��һVdr��2�����ƽ�� ���������� 2 ϵ�y(t��ng)���ɔ_ԭ���c���� Ҫ��(g��u)��늴Ÿɔ_��Ҫ�M��3���l�����ɔ_Դ�������;�������ɔ_�O(sh��)�䡣���;����������(d��o)��Ϻ�ݗ����σɷN��ǰ���ѽ�(j��ng)ָ���������ƽ��׃��ϵ�y(t��ng)�ď�(f��)�s�Y(ji��)��(g��u)�����ܵ�����ϵ�y(t��ng)�ⲿ��ϵ�y(t��ng)��(n��i)�������ĸɔ_��������ҪӑՓϵ�y(t��ng)�еĂ���(d��o)��ϣ�����Ӳ����ܛ���ɂ�����o����Ч���ɔ_��ʩ�� 2.l Ӳ�����ɔ_��ʩ 2��1��1 �Դݔ��˿ڵĿ��ɔ_��ʩ ���늾W(w��ng)ݔ��˿�̎�ĸɔ_��Ҫ�ǂ���(d��o)�ɔ_�������ɷ��棺һ��늾W(w��ng)�ϵĸɔ_ͨ�^�Դ�������O(sh��)�䣬�@�N�ɔ_�����ǁ��Թ�늾W(w��ng)�����O(sh��)��a(ch��n)���Ă���(d��o)�Ըɔ_��Ҳ�����ǿ��g��늴Ų����Դ���Ϯa(ch��n)���Ĺ�ģ�ɔ_����һ������Ҫ�����������·�����a(ch��n)�����C���ɔ_��늴������Լ�������늵ĺ��·�a(ch��n)����늴����Ԃ���(d��o)�����ʽ��(d��o)��늾W(w��ng)����ͬһ늾W(w��ng)��(n��i)�������O(sh��)��a(ch��n)���ɔ_�� �o���Դ�����ø��l�_�P(gu��n)�Դ�����ڲ�����PWM���g(sh��)���������_�P(gu��n)���������ڸ��lͨ���B(t��i)���@�N���l�Ŀ���ͨ���^�̱���a(ch��n)�����l��������ؓ(f��)�d��ֱ�ӂ���(d��o)늴���(��ģ����ģ�ɷN������(d��o)��ʽ)����(y��n)��Ӱ푔�(sh��)�ֿ���ϵ�y(t��ng)���������� EMI�V��������������˲�B(t��i)������l����ɵĸɔ_���ǽ�Q����(d��o)�ɔ_ʮ����Ч�ķ����� ͨ�����õ�EMI�V�����Y(ji��)��(g��u)��D3��ʾ������C1��C2�Dz�ģ���L1��L2�ǹ�ģ늸���C3��C4��C5��C6�ǹ�ģ��ݡ� �������� ���ǣ��@�NEMI�V�����Y(ji��)��(g��u)�������������@�IJ��㣺���ڃɂ���ģ���C1��C2�����м���늸У����ԃɂ�����늸�֮�g���a(ch��n)����ϣ����������֕��c��ģ늸Юa(ch��n)����ϡ��@�ӣ��ڸ��l��������(y��n)��Ӱ�EMI�V���������ܡ���ˣ��҂������˸��M(j��n)�ĽY(ji��)��(g��u)����D4��ʾ�� ���������� �ڸ��M(j��n)��EMI�V�����Y(ji��)��(g��u)�У��ɂ���ģ��ݲ���X���B�ӣ��@�����ĺ�̎�ǿ��Դ��pС������������м���늸��������ϣ��O��ظ�����EMI�V�����ĸ��l���ܡ� 2 1��2 �������·���ɔ_��ʩ 1)����BUSSBAP�Y(ji��)��(g��u)�O(sh��)Ӌ ֱ��ĸ������BUSBAR�Y(ji��)��(g��u)�O(sh��)Ӌ���������~����~�l���挧(d��o)����ʹֱ��ĸ��ƽ�Ќ�(d��o)�w�����@�ӿ��Խ����侀늸У��pС����a(ch��n)���ĸɔ_��ͬ�r��������IGBTͨ���r����ӿ�ꉺ��dv��dfҲ��Ч���� 2)���_�����· IGBTͨ���r�a(ch��n)����dv��df��di��df����ϵ�y(t��ng)������������ɸɔ_���ڴ��ʑ�(y��ng)�È��ϣ�����늉�������ȼ��^�ߣ��ɔ_�����Ӈ�(y��n)�أ���횸���(j��)���HҪ���x�������·��ʽ���{(di��o)��Ԫ������(sh��)�� ��˲����ˈD5��ʾ�ĽY(ji��)��(g��u)���εľ��_�·��������������ƽ�Y(ji��)��(g��u)�����ԣ����ⲿ���CS1,CS2�ij��늁��Q�ƃ�(n��i)��IGBT�ϵ�늉���ʹ֮��ͻ׃��Cov1��Cov2��������·�sɢ늸��ϵ��������Ķ��Q���^늉���Cov1��Cov2Ҫ�M��������ۂ�(c��)�����������s1��Rs2���ßo����裬���ն��O�ܲ��ÿ�֏�(f��)���O�ܡ����_�·Ԫ������(sh��)�x��ɰ�ʽ(1)��ʽ(2)��ʽ(3)�xȡ�� ʽ�У�Lp��ĸ���ϵ��sɢ늸У� IL��ؓ(f��)�d����� ��V������늉���ֵ�� f��IGBT�_�P(gu��n)�l�ʡ� 3)�������ɔ_��ʩ����׃��ݔ�����B����ͨ�V������IGBT��G��E����֮�g����С���������������dv��df��di��dt�� 2��1��3 ��(sh��)�ֿ���ϵ�y(t��ng)���ɔ_��ʩ ���IJ��û���DSP��CPLD�Ĕ�(sh��)�ֿ���ϵ�y(t��ng)������߿���ϵ�y(t��ng)�Ĝ�(zh��n)�_�ԺͿɿ��ԣ������ׂ������M(j��n)��늴ż����O(sh��)Ӌ����߿���ϵ�y(t��ng)�Ŀ��ɔ_������ 1)�o���Դ���ɔ_��ʩ��(sh��)�ֿ���ϵ�y(t��ng)ݔ���Դ��5V��ͨ�^LMll17T�D(zhu��n)�Q�ɵ�3��3V��DSP��CPLD��늡�ֱ���Դ�Ĺ�����Ҫ��ݔ��늉�����(w��n)��Ƿ�����늡�ֱ��늉�����(w��n)���|(zh��)�Ƿ���(f��)��Ƿ���^�̣���ֱ�ӌ���(sh��)�ֿ���ϵ�y(t��ng)�a(ch��n)���ɔ_����˲�����MC34064�Դ�O(ji��n)ҕIC�·�O(ji��n)ҕ5Vֱ���Դݔ��늉����D6�o�����·�ӷ��� �������� ��(d��ng)늉�����4.59V�r���O(ji��n)ҕ�·���a(ch��n)�����m(x��)�ď�(f��)λ��̖ʹDSP��CPLD̎�ڏ�(f��)λ��B(t��i)�������䲻���������������¹ʡ���(d��ng)�Դݔ���֏�(f��)�����r(>4��6lV)���·��(j��ng)�^һ��Ҏ(gu��)�������t�r�g������(f��)λ��̖�����C��(sh��)�ֿ���ϵ�y(t��ng)���������������ӕr�r�g��CDLY�_���� 2)���w���ɔ_���g(sh��)��(sh��)�ֿ���ϵ�y(t��ng)ݔ����PWM��̖���ڂ�ݔ�^���Е��ܵ��L����ݔ�ɔ_��Ӱ푡���ԭ����D7��ʾ���ɔ_���ȿ���ʽ(4)�_���� ʽ�У�Ur��ɔ_Դ�� Ui��ɔ_늉����ȣ� Zs���Ч��̖Դ�迹�� Zo���Чؓ(f��)�d�迹�� Zi���Ч�ɔ_Դ�迹�� PWM��̖�ڂ�ݔ�^���У����ݔ���^�L����(qi��ng)��}�_��ͨ�^��ݔ���ķֲ���ݺͷֲ�늸Ќ�PWM��̖�a(ch��n)���ɔ_�������̖�ܵ��ɔ_���ӕr̫�t���·��IGBT�͟o�����_���_ͨ���P(gu��n)�࣬�п��ܕ���ɶ�·��齉������� �������� ��ˣ������ڔ�(sh��)�ֿ���ϵ�y(t��ng)�c�(q��)���·֮�g���ù��w�B�ӡ��D8�o���˲��ù��w���պͰl(f��)����B�ӷ�ʽ�� ���w�B�ӵİl(f��)��ͽ���֮�g�]��ֱ�ӵ�늚��B�ӣ��܉_����PWM������̖�����H��Q�˹����·�Ϳ����·֮�g�ď�(qi��ng)��늸��x����늴Ÿɔ_���}�������܉�?q��)��F(xi��n)�(q��)����̖���h(yu��n)���x���ͣ��ӕrС�� 3)PCB���ɔ_��ʩ (1)�����Դƽ��͵�ƽ�� ���ڔ�(sh��)�ֿ���ϵ�y(t��ng)�Ǹ��l���ٵĔ�(sh��)���}�_�·��������������̖�ӵ�ϵ�y(t��ng)��횾��ИO�͵ĵ��迹���·������Ԫ���ӵ������ص�����늸бM����С��������˜pС�Դ˲�B(t��i)��늉���Ҫ�pС�Դ��������늸С����ԣ����ĵĔ�(sh��)�ֿ���ϵ�y(t��ng)�����ČӰ�Y(ji��)��(g��u)�����g�ɌӞ�Ϊ����Դ�Ӻ͵،ӣ����Դ��pС���迹��Ϯa(ch��n)���Ă���(d��o)�ɔ_�� (2)ȥ��V�����ɔ_����ȥ����ݿ���������ؓ(f��)�d׃�����a(ch��n)�����������w�����ǣ����Դݔ���Ҫ���늽���ݣ��ڔ�(sh��)�������·оƬ��VCC��GND֮�g�ø��l��늸е��մ�����M(j��n)��ȥ��V����ȥ����ݹ�늻�·����eԽСԽ�ã�Խ�ӽ�оƬԽ�ã�ȥ���������Խ��Խ�á� (3)��(sh��)���cģ�M�·��̎�픵(sh��)�ֿ���ϵ�y(t��ng)�м���ģ�M�·���Д�(sh��)���·��Ҫ�������M�����_�����Ҍ�ģ�M�·�ĵغ͔�(sh��)���·�ĵط��_������ٽӵ�һ���ڹ����c�x�ú��m��늸У�����(sh��)���·�е��(qi��ng)�ɔ_���x�����ӷ���D9��ʾ�� �������������� ���⣬���ɔ�(sh��)���·оƬ�]���õ��Ĺ��_��Ҫ���գ���(y��ng)ԓ�ӵ�GND��VCC����ֹ����Ҫ���_�P(gu��n)�D(zhu��n)�Q�����a(ch��n)���� 2.1��4 �(q��)�ӱ��o(h��)�·���ɔ_��ʩ ���IJ���Powerx��˾�ļ����(q��)��ģ�KM57962L���ڿ��ɔ_���棬��������(y��u)�c�� 1)��(n��i)�����и��ٹ�����(q��)���}�_��̖�c�(q��)���·��(n��i)�����x���@�ӿ����·�c�(q��)���·���F(xi��n)��늚���x����ֹ��늚���Ϯa(ch��n)���ĸɔ_�� 2)�ŘO�(q��)�Ӳ����p�O�Կ���늉���ʹ��ؓ(f��)�ĖŘO늉����ԫ@���^�ߵĿ��ɔ_�ԣ��DlO�Dz��ù��w���͵��(q��)���·ʾ��D�� ���⣬�҂����������¿��ɔ_��ʩ�� 1)���T�O�(q��)�����U(ku��)�ӱ���ӛ�d�Ę�(bi��o)��(zh��n)ֵ��2��3�����@�ӿ���ʹ���Q�r�g׃�L���Ķ�ʹIGBT��dv��dt��di��dt���͡� 2)���������������·���(q��)���·�ĸɔ_����Ҫ���(q��)���·��Ԫ���������֣���Dll��ʾ�� (1)S1��S3������S2��S4�������ɽM֮�g�����m��(d��ng)?sh��)ľ��x�� (2)�(q��)�ӱ��o(h��)�·�cIGBTģ�K֮�g�x���迹�ߡ�����ģ�ɔ_������(qi��ng)���p�g���������M���̣ܶ��ԜpС����늸У��ɾ��g���gԽ��Ч��Խ�á� 3)ÿ��lCBT�|�l(f��)�·������ͨ�^׃�������x����������Դ��늣��Ա���늴���ͨ�^�����迹��ό��˴ˮa(ch��n)���ɔ_�� 2.2 ܛ�����ɔ_��ʩ �������ϲ��õ�Ӳ�����ɔ_��ʩ�⣬�������ܛ�����ɔ_�������܉����̶ȵ����Ƹɔ_��ܛ�����ɔ_��Ҫ�������ɷ��棺 1)����ģ�Mݔ����̖�����ɔ_�� 2)�ڔ�(sh��)�ֿ���ϵ�y(t��ng)�ܵ��ɔ_���������w�r��ʹ�����(f��)λ���܉�������������ᘌ�����ɷN��r����ȡ�����¿��ɔ_��ʩ�� (1)��(sh��)�֞V��������Ч������ģ�Mݔ����̖�������Ķ������ڔ_�����÷����������V������ֵ�V�������g(sh��)ƽ���V�����ә�(qu��n)ƽ���V���ȡ� (2)�O(sh��)�����T�� ��(d��ng)DSP�ܵ��ɔ_�������y�w��ʹ�����M(j��n)�롰��ѭ�h(hu��n)���r��ͨ�^�Д����(w��)����ʹ����ص���ʼ���ĵ�һ�С� (3)ܛ������DSPTMS320LF2407�ж��_(d��)64K�ij���惦���g��ͨ����ʹ�Õr���д���δ�õĿ��g�����@Щ�^(q��)���O(sh��)��һ������(d��o)����(d��ng)�����ܵ��ɔ_����ԓ�^(q��)��r������(d��o)����?q��)����?qi��ng)��ָ��?q��)��T��������e�M(j��n)��̎���ij���ε�ַ���Ķ�ʹ�������¼{����܉�� (4)������(d��ng)�����ܵ��ɔ_�y�w���ǿհεij���Εr�����Բ��ó������g(sh��)�����w˼·�nj�����ģ�K����ÿ��ģ�K(�ӳ���)��(zh��)��һ�����ܣ���ֻ��һ������(RET)����ͨ�^һ��ģ�KID�Ĵ�������ÿ���ӳ�������һ��Ψһ��ID̖�a��ÿ��(d��ng)�ӳ���Ҫ����(RET)֮ǰ���Ȍ����ӳ����ID̖����ID�Ĵ��������ص��ϼ���������Д�l(xi��ng)D�Ĵ����е�ID̖��������_���t�^�m(x��)��(zh��)�У���������_���t��ʾPCָ��п����ѽ�(j��ng)���e���@�rʹ�����(f��)λ���ص���ʼ����һ�С� (5)ܛ�������ھ�������r���M���ܶ���Æ��ֹ�(ji��)ָ����⣬�ڳ����P(gu��n)�I�ط��Լ�RET��CALL��BCND��B��ָ��֮ǰ����2�l��3�lNOPָ��@�ӣ�����ʹ���ܵ��ɔ_���y�w�ij���{����܉���_���@Щ��Ҫָ��Ĉ�(zh��)�С� (6)��(sh��)��(j��)�ı��o(h��)�ͻ֏�(f��)�ڳ����У��������ָ���׃�Y(ji��)�����|(zh��)�Ĕ�(sh��)��(j��)����ÿ�θ�׃ǰ���M���ܵر��o(h��)��������Ҫ�r�ٻ֏�(f��)�� 3 �Y(ji��)�Z ���Ľo���˻���DSP�cCPLD��(sh��)�ֿ���ϵ�y(t��ng)�Ķ��O����λ���ƽ��׃����ϵ�y(t��ng)�O(sh��)Ӌ���������c������ϵ�y(t��ng)�O(sh��)Ӌ�е�늴ż��݆��}����ᘌ��@Щ���}���քe��Ӳ����ܛ���ɷ����������Ч�Ľ�Q���������@Щ�����������ƽ��׃��ϵ�y(t��ng)�У��܉���Ч������늴Ÿɔ_����������ϵ�y(t��ng)�ķ�(w��n)���ԺͿɿ��ԡ� |