|
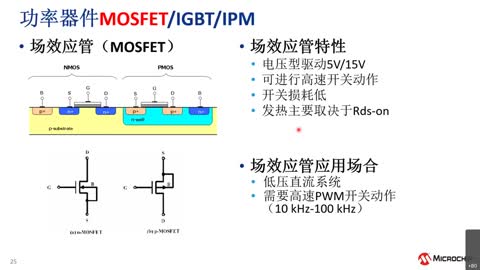
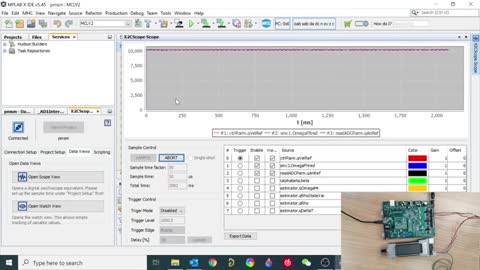
數字控制系統能給設計人員帶來很多優勢,比如它能執行高級運算并降低成本。因此,在執行數字馬達控制系統時,數字處理器的選擇就成為需要考慮的主要問題。 現實世界中的信號在時間上是連續的,而另一方面,信號數字化表示的精密有限,而且采樣時間上不連續,因此導致了量化。明顯的量化源包括ADC,具有截位、舍入、溢出誤差特性的計算引擎以及脈寬調制(PWM)發生器。 使用更長字長的ADC可將ADC的量化誤差最小化(嵌入式控制器中一般采用的是12位ADC)。另外設計者也需要注意采樣多個電流時會產生的誤差。如果使用一個ADC來連續采樣兩個電流,那么所產生的誤差就能得到限制。 如果使用帶雙取樣和保持電路的ADC,就可以避免這種誤差。算法的數值表示是量化效應存在的最關鍵領域。同時使用模擬和實驗分析法來研究實際的數字控制器,是一種分析量化誤差的實用方法。下面圖1所示的系統就采用了模擬執行和試驗執行。 圖1:數字處理器的選擇是執行數字馬達控制系統時需要考慮的一個主要問題 該系統的算法采用了三種格式:16位定點、32位定點和32位IEEE-754單精度,全都使用了同 一種32位定點數字控制器-TI公司的TMS320F2812,以及用于32位定點編程的TI“IQmath”庫。 “IQmath”庫讓設計師能夠輕松快速地將以浮點格式編寫的C語言代碼轉換成32位定點格式。由于在定點處理器上執行浮點演算效率不夠高,浮點格式的實現需要更長的4kH的采樣時間。因此,為公平起見,實驗結果將只在16位和32位定點格式之間進行比較。 為了比較三種數據格式對數值精度的影響,對估計的速度響應和相應的d軸和q軸參考電流分別進行了觀察。 圖2:同時使用模擬和實驗分析法來研究實際的數字控制器是一種分析量化誤差的實用方法 16位定點系統(上圖2)出現了偽瞬態和振鈴現象,而32位則沒有。實驗的結果也顯示了相似的特征。在實際系統中,這些瞬態現象會帶來可聞噪音和振動(如下圖3)。 采樣頻率任何數字系統都必須考慮的一個關鍵因素是采樣頻率-奈奎斯特定理。必須得出系統中最高的頻率分量。通常做法是為一階系統選擇至少4倍的頻率。為了展示這一效果,我們分解了一個簡單的單極傳輸函數。該傳輸函數用公式表示為:G(s) = s + 100/100在恰當的采樣間隔中,系數沒有問題。但當采樣過度時,就會產生嚴重的分辨率問題。檢查一下系數大小,就能發現量化效應。隨著采樣率的提高,分子系數會下降。 當采樣率為10微秒時,系數下降到了0.00099950016,顯示為0x0020。這意味著系數有一個5位的分辨率,這對16位處理器來說是個嚴重問題。此時,如果采用32位運算,可以獲得更好的數值。在這種情況下,一個能夠用原生32位表示分數的32位處理器,如TMS320F2812,就可以避免這些問題。 產生PWM輸出嵌入式控制器中的數字脈寬調制器(PWM)使用一個計數器和一個比較緩存器來產生PWM輸出。但這種方案有它的缺點:PWM輸出中最小的變化等于計數器的時鐘周期,當PWM頻率增加時會帶來量化問題。 這一點在控制與馬達控制反相器相關的功率因子校正階段時尤其重要,在這種情況下,超過200kHz的PWM頻率都是很常見的。此時100MHz組件的PWM分辨率約為8到9位,會產生極限周期的問題。而TMS320F280x數字信號控制器首次實現的高分辨率PWM架構就可以解決這個問題,這種架構可以提供150ps的分辨率。 圖3:該系統分別用了模擬實現和實際實現,其中的算法用16位定點、32位定點和32位IEEE-754單精密度浮點三種不同格式實現 圖4:16位定點系統出現了偽瞬態和振鈴現象,而32位則沒有 上面的圖4顯示了運行中的高分辨率PWM和標準PWM。從軟件曲線中可以看出,當高分辨率功能關閉時階梯就會產生。 而當開啟高分辨率功能時,就形成了黃色曲線。很明顯,高分辨率PWM可以將PWM輸出中的量化誤差降低幾個數量級,因而顯著降低由較低分辨率的PWM引起的極限周期。 系統設計人員可以使用32位運算來改進馬達控制系統的性能。而且,32位運算可讓設計者無需再詳細檢查算法的量化問題,使他們可以使用更高的采樣率,從而提升系統帶寬。為了充分了解量化效應并獲得最好的性能,設計人員必須通過高分辨率PWM這樣的技術改進來恰當解決輸出量化的問題。 |