|
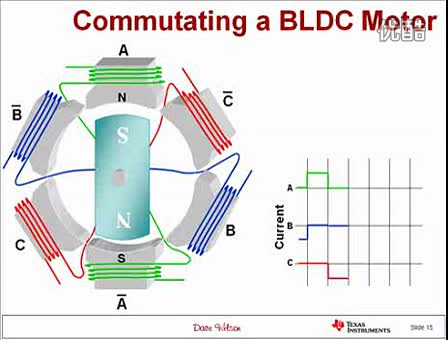
四軸飛行器是近來在專業與非專業領域都非常火爆的技術產品。下面這篇文章針對四軸飛行器無位置傳感器無刷直流電機的驅動控制,設計開發了三相六臂全橋驅動電路及控制程序。設計采用ATMEGA16單片機作為控制核心,利用反電勢過零點檢測輪流導通驅動電路的6個MOSFET實現換向;直流無刷電機控制程序完成MOSFET上電自檢、電機啟動軟件控制,PWM電機轉速控制以及電路保護功能。該設計電路結構簡單,成本低、電機運行穩定可靠,實現了電機連續運轉。 近年來,四軸飛行器的研究和應用范圍逐步擴大,它采用四個無刷直流電機作為其動力來源。無刷直流電機為外轉子結構,直接驅動螺旋槳高速旋轉。 無刷主流電機的驅動控制方式主要分為有位置傳感器和無位置傳感器的控制方式兩種。由于在四軸飛行器中的要求無刷直流電機控制器要求體積小、重量輕、高效可靠,因而采用無位置傳感器的無刷直流電機。本文采用的是朗宇X2212 kv980無刷直流電機。 無刷直流電機驅動控制系統包括驅動電路和系統程序控制兩部分。采用功率管的開關特性構成三相全橋驅動電路,之后使用DSP作為主控芯片,借助其強大的運算處理能力,實現電機的啟動與控制,但電路結構復雜成本高,缺乏經濟性。 直流無刷電機的換向采用反電勢過零檢測法,一旦檢測到第三相的反電勢過零點就為換向做準備。反電勢過零檢測采用虛擬中性點的方法,通過檢測電機各相的反電勢過零點來判斷轉子位置。而基于電機三相繞組端電壓變化規律的電機電流換向理論,可以大大提高系統控制精度。 本文無刷直流電機的驅動電路采用三相六臂全橋電路,控制電路的管理控制芯片采用ATmega 16單片機實現,以充分發揮其高性能、資源豐富的特點,因而外圍電路結構簡單。無刷直流電機采用軟件啟動和PWM速度控制的方式,實現電機的啟動和穩定運行,大大提高四軸飛行器無刷直流電機的調速和控制性能。 1 三相六臂全橋驅動電路 無刷直流電機驅動控制電路如圖1 所示。該電路采用三相六臂全橋驅動方式,采用此方式可以減少電流波動和轉矩脈動,使得電機輸出較大的轉矩。在電機驅動部分使用6個功率場效應管控制輸出電壓,四軸飛行器中的直流無刷電機驅動電路電源電壓為12 V.驅動電路中,Q1~Q3采用IR公司的IRFR5305(P溝道),Q4~Q6為IRFR1205(N 溝道)。該場效應管內藏續流二極管,為場效應管關斷時提供電流通路,以避免管子的反向擊穿,其典型特性參數見表1.T1~T3 采用PDTC143ET 為場效應管提供驅動信號。 表1 MOSFET管參數 由圖1 可知,A1~A3 提供三相全橋上橋臂柵極驅動信號,并與ATMEGA16單片機的硬件PWM驅動信號相接,通過改變PWM信號的占空比來實現電機轉速控制;B1~B3提供下橋臂柵極驅動信號,由單片機的I/O口直接提供,具有導通與截止兩種狀態。 圖1 無刷直流電機三相六臂全橋驅動電路 無刷直流電機驅動控制采用三相六狀態控制策略,功率管具有六種觸發狀態,每次只有兩個管子導通,每60°電角度換向一次,若某一時刻AB 相導通時,C 相截至,無電流輸出。單片機根據檢測到的電機轉子位置,利用MOSFET的開關特性,實現電機的通電控制,例如,當Q1、Q5 打開時,AB 相導通,此時電流流向為電源正極→Q1→繞組A→繞組B→Q5→電源負極。類似的,當MOSFET 打開順序分別為Q1Q5,Q1Q6,Q2Q6,Q2Q4,Q3Q4,Q3Q5時,只要在合適的時機進行準確換向,就可實現無刷直流電機的連續運轉。 2 反電勢過零檢測 無刷直流電機能夠正常連續運轉,就要對轉子位置進行檢測,從而實現準確換向。電機轉子位置檢測方式主要有光電編碼盤、霍爾傳感器、無感測量三種方式.由于四軸飛行器無刷直流電機要求系統結構簡單、重量輕,因而采用無位置傳感器的方式,利用第三相產生的感生電動勢過零點時刻延遲30°換向。雖然該方法在電機啟動時比較麻煩,可控性差,但由于電路簡單、成本低,因而適合于在正常飛行過程中不需要頻繁啟動的四軸飛行器電機。 由于無刷直流電機的兩相導通模式,因而可以利用不導通的第三相檢測反電勢的大小。如圖2反電勢檢測電路,中性點N 與單片機的AIN0 相接,Ain,Bin,Cin分別接單片機的ADC0,ADC1,ADC2.不停地比較中性點N電壓與A,B,C三相三個端點電壓的大小,以檢測出每相感生電動勢的過零點。ATMEGA16單片機模擬比較器的正向輸入端為AIN0,負向輸入端根據ADMUX寄存器的配置而選擇ADC0,ADC1,ADC2,從而利用了單片機自帶的模擬比較器的復用功能。當A,B相通電期間,C相反電勢與中性點N進行比較,類似的,就可以成功檢測出各相的過零事件。 圖2 反電勢檢測電路 電機的反電勢檢測出來后,就可以找到反電勢的過零點,在反電勢過零后延遲30°電角度進行換向操作。 3 控制程序設計 3.1 驅動控制電路上電自檢 無刷直流電機驅動控制部分包括MOSFET 自檢、電機啟動控制和電壓電流監測功能3部分。驅動控制電路的上電自檢流程如圖3 所示,包括MOSFET 短路特性與導通特性測試、以防止過流損壞電路。 圖3 驅動控制電路上電自檢流程圖 3.2 軟件啟動控制 反電勢檢測法只有在電機正常運轉后才能進行,當電機不轉或轉速很低時,其反電勢無法檢測,因而采用軟件啟動的方式。針對無位置傳感器無刷直流電機的控制,本文采用三步啟動的方法,首先,給A,B相通電一段時間以固定電機轉子位置;六狀態輪流換向,通電時間逐步減少;檢測第三相的反電勢,若正常則啟動成功,否則重新啟動。具體的啟動流程如圖4所示。 圖4 無刷無感直流電機啟動流程 3.3 系統保護功能設計 四軸飛行器的系統保護功能包括電壓、電流監測功能。電池電壓監測功能電路:通過簡單的分壓電路將電池電壓降到單片機A/D 轉換允許的輸入范圍內(0~5 V),通過電壓監測防止電壓不足時電機停轉;電流檢測功能電路:通過0.01 Ω電阻采樣電流,轉化為電壓,送到單片機的A/D轉換口,以防止發生故障時大電流損壞電路。在電流監測時,采用簡單的數值平均濾波方式,減弱瞬時峰值電流對測量結果的影響。 4 結語 本文實現四軸飛行器的直流無刷電機的驅動電路和系統控制軟件程序設計。驅動電路采用三相六臂全橋電路,MOSFET 作為開關元件,利用ATmega 16 單片機作為控制芯片,反電勢過零檢測以及軟件啟動的控制方式,并延遲30°進行換向。正常啟動后,單片機輸出PWM 實現無刷直流電機轉速調節。同時設計了電壓、電流監測電路,保證系統安全,因而,該系統能夠正常驅動無位置傳感器無刷直流電機,并且能夠應用于四軸飛行器。 |