|
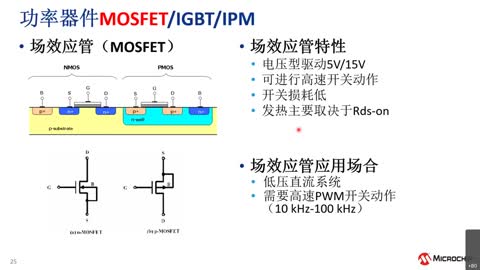
�~(y��)��΄�(d��ng)���и�Ч�ԡ��C(j��)��(d��ng)���Լ������Եȃ�(y��u)�c(di��n)����ˣ������C(j��)���~(y��)���о����ɞ��C(j��)�����о��I(l��ng)��ğ��c(di��n)���S�������C(j��)���~(y��)�о��IJ������룬�����C(j��)���~(y��)��ˮ���Ѿȡ�ˮ�|(zh��)�z�y(c��)�Լ������YԴ��̽���I(l��ng)��l(f��)�]����Ҫ�����á������(l��i)���C(j��)���~(y��)Ҳ�ɞ��(gu��)��(n��i)��(gu��)�H��У�C(j��)���˱�ِ�(xi��ng)Ŀ֮һ�����ľ���ᘌ�(du��)�ڇ�(gu��)�Hˮ�ЙC(j��)���˴�ِ�Ĵ�ƽ�_(t��i)�ϵ����P(gu��n)��(ji��)�C(j��)���~(y��)���O(sh��)Ӌ(j��)��һ���p�P(gu��n)��(ji��)�C(j��)���~(y��)����ϵ�y(t��ng)�����C(j��)���~(y��)����ϵ�y(t��ng)�����w�eС���ɱ��͡����ĵȃ�(y��u)�c(di��n)�����Է�����\(y��n)�õ���ƵęC(j��)���~(y��)�a(ch��n)Ʒ�С� 1 �C(j��)���~(y��)����ϵ�y(t��ng)�O(sh��)Ӌ(j��)���� �C(j��)���~(y��)����ϵ�y(t��ng)���w�Y(ji��)��(g��u)��D1��ʾ��ϵ�y(t��ng)��Ҫ�֞�ָ��l(f��)�Ͷ˺�ָ���(zh��)�жˣ��ɲ��־���CC1110�o(w��)����Ƭ�C(j��)������Ŀ�������ؓ(f��)؟(z��)ָ��İl(f��)�͡����ա���(sh��)��(j��)̎�����M(j��n)�����ƙC(j��)���~(y��)�����P(gu��n)��(zh��)�ЙC(j��)��(g��u)������ָ��l(f��)�Ͷ˵�ָ���(l��i)����λ�C(j��)��USB�����D(zhu��n)�Q�·��USB�ӿ�ģ�M�ɴ��ڣ���(sh��)�F(xi��n)��λ�C(j��)�cCC1110�Ĵ���ͨ�š��Դģ�K���늉���׃�Q�������P(gu��n)�·�ṩ���N���m�Ĺ���늉����惦(ch��)��ģ�K�惦(ch��)�C(j��)���~(y��)�����P(gu��n)��Ϣ����C(j��)�(q��)��(d��ng)ģ�K���(zh��)�ЙC(j��)��(g��u)��C(j��)�ṩ���m�Ŀ�����̖(h��o)�� �D1 �C(j��)���~(y��)����ϵ�y(t��ng)���w�Y(ji��)��(g��u)�D 2 �C(j��)���~(y��)����ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��) 2.1 USB�����D(zhu��n)�Q�· CH341T��һ��USB�����D(zhu��n)��оƬ��ͨ�^(gu��)��(ji��n)�εĽӾ����Ɍ�(sh��)�F(xi��n)USB�ӿںʹ���֮�g���D(zhu��n)�Q���˕r(sh��)�o(w��)��Ą�(d��ng)��λ�C(j��)�c��λ�C(j��)�ij���ͨ�^(gu��)USB�ӿڼ��Ɍ�(sh��)�F(xi��n)��λ�C(j��)�c��λ�C(j��)�Ĵ���ͨ�š�USB�����D(zhu��n)�Q�·ԭ��D��D2��ʾ�� �D2 USB�����D(zhu��n)�Q�· �ڱ��O(sh��)Ӌ(j��)�·�У���CH341TоƬ��SDA��SCL���_�ҿգ��˕r(sh��)оƬ���ܞ�USB�D(zhu��n)�������ڣ�ģ�MӋ(j��)��C(j��)����;CH341TоƬ��TXD��RXD�ɂ�(g��)���_�քe�B�ӵ�CC1110�o(w��)����Ƭ�C(j��)��RX(P0.2)��TX(P0.3)�ɂ�(g��)���_;TEN#���_�鴮�ڰl(f��)��ʹ�ܶˣ��ӵ�ʹCH341T�ܰl(f��)�͔�(sh��)��(j��)��CH341TоƬ�ĵ�Ҫ��CC1110�o(w��)����Ƭ�C(j��)�ĵ����B��CH341T��������Դ��ֱ������λ�C(j��)ͨ�^(gu��)USB���ṩ+5V�Դ�� 2.2 DC��DC늉�׃�Q�· ָ��l(f��)�Ͷ���USB�ṩ5V늉���ָ���(zh��)�ж���늳��ṩ5Vֱ��늉���늳��ṩ��5Vֱ��늉�����ֱ�Ӟ��C(j��)�(q��)��(d��ng)оƬ�Լ���C(j��)��늡���ϵ�y(t��ng)��(n��i)��CC1110�o(w��)����Ƭ�C(j��)��������늉�������2.0��3.6V���惦(ch��)��оƬ24AA01��������늉�������1.7��5.5V���@����Ԍ����ߵĹ���늉��x���3.3V����ˣ����T�O(sh��)Ӌ(j��)��һ��(g��)DC��DC늉�׃�Q�·����5Vֱ��늉�׃�Q��3.3Vֱ��늉������ṩ�oCC1110�o(w��)����Ƭ�C(j��)��24AA01оƬ���Ա��Cϵ�y(t��ng)�������������@�����AMS��˾���a(ch��n)��AMS1117оƬ�O(sh��)Ӌ(j��)��늉�׃�Q�·�����w��DC-DC늉�׃�Q�·��D3��ʾ�� �D3 DC-DC늉�׃�Q�· ��늉�ݔ��˽���22 ��F늽������늉�ݔ���˽���47 ��F늽���ݣ��Ա��Cݔ��늉��ķ�(w��n)���� 2.3 CC1110�o(w��)���հl(f��)�· �ڙC(j��)���~(y��)����ϵ�y(t��ng)�У��C(j��)���~(y��)ָ��İl(f��)�͡������Լ�ָ�������(zh��)����ϵ�y(t��ng)���P(gu��n)�I���֡����F(xi��n)�еğo(w��)���հl(f��)ϵ�y(t��ng)�ܶ�Dz��Æ�Ƭ�C(j��)��RF�հl(f��)ģ�K�M�ɣ��@������(g��)�����·���w�e�^����(hu��)ʹ�C(j��)���~(y��)���w�e׃���ˌ��C(j��)���~(y��)�w�e��С�Լ������Ľ��ͣ��@�����TI��˾���a(ch��n)��һ�N�ͳɱ������ĵ�CC1110�o(w��)����Ƭ�C(j��)����ָ���հl(f��)��(zh��)�еĺ���������CC1110�o(w��)���հl(f��)�·��D4��ʾ�� �D4 CC1110�o(w��)���հl(f��)�· �ڟo(w��)���հl(f��)�·�У����C1��C6���Դȥ�����;���R2�����C18��(g��u)����늏�(f��)λ�·;���C7��C9�Լ�늸�L1��L2��(g��u)��BALUN�迹ƥ���·����ݔ���迹�D(zhu��n)�Q��50 ����(bi��o)��(zh��n)�쾀�迹;Y1��C13�Լ�C14��(g��u)��CC1110���ٕr(sh��)�Դ;Y2��C15�Լ�C16��(g��u)��CC1110���ٕr(sh��)�Դ��JATG�ӿ������ھ��{(di��o)ԇ�c���d����  WM01(P1.0)��PWM02(P1.1)�Ӷ�C(j��)�(q��)��(d��ng)�·��ݔ��;RX(P0.2)��TX(P0.3)��USB�����D(zhu��n)�Q�·�����ڴ���ͨ��;2401_WP(P0.4)��2401_SCL(P0.5)�Լ�2401_SDA(P0.6)�Ӵ惦(ch��)��ģ�K�����ƴ惦(ch��)�����x���� WM01(P1.0)��PWM02(P1.1)�Ӷ�C(j��)�(q��)��(d��ng)�·��ݔ��;RX(P0.2)��TX(P0.3)��USB�����D(zhu��n)�Q�·�����ڴ���ͨ��;2401_WP(P0.4)��2401_SCL(P0.5)�Լ�2401_SDA(P0.6)�Ӵ惦(ch��)��ģ�K�����ƴ惦(ch��)�����x����2.4 ��C(j��)�(q��)��(d��ng)�· �ڙC(j��)���~(y��)����ϵ�y(t��ng)�У��҂����ö�C(j��)�Ĕ[��(d��ng)��(l��i)ģ�M�C(j��)���~(y��)���΄�(d��ng)�����o(w��)����Ƭ�C(j��)�a(ch��n)����PWM��̖(h��o)�������(q��)��(d��ng)��C(j��)���鱣�C��C(j��)����������Ҫ���T�O(sh��)Ӌ(j��)һ��(g��)��C(j��)�(q��)��(d��ng)�·����C(j��)�(q��)��(d��ng)�·������NXPSemiconductors��˾���a(ch��n)��74AHCT1G04оƬ����C(j��)�(q��)��(d��ng)�·ԭ��D��D5��ʾ�� �D5 ��C(j��)�(q��)��(d��ng)�· 2.5 �惦(ch��)���· �ڙC(j��)���~(y��)��ʼ���A���Լ��ڙC(j��)���~(y��)�����^(gu��)������Ҫ�惦(ch��)һЩ����(sh��)�����Ҫ�Ќ��T�Ĵ惦(ch��)ģ�K�����څ���(sh��)�Ĕ�(sh��)��(j��)�����^С���@�����Microchip��˾���a(ch��n)��I2C�ӿڵ�24AA01�惦(ch��)оƬ���惦(ch��)���·ԭ��D��D6��ʾ�� �D6 �惦(ch��)���· 3 �C(j��)���~(y��)����ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��) �ڙC(j��)���~(y��)����ϵ�y(t��ng)��ܛ���O(sh��)Ӌ(j��)����ģ�K���O(sh��)Ӌ(j��)����Ҫ��������ͨ�ų��o(w��)��ͨ�ų��惦(ch��)���x�������Լ���C(j��)�(q��)��(d��ng)���� 3.1 ����ͨ�ų����O(sh��)Ӌ(j��) ����ͨ�ų������CC1110�o(w��)����Ƭ�C(j��)�c��λ�C(j��)PC�Ĵ���ͨ�š����ڽ��Ք�(sh��)��(j��)�����Д�ķ�ʽ�����ڰl(f��)�͔�(sh��)��(j��)���ò�ԃ�ķ�ʽ�������հl(f��)�������̈D��D7��ʾ�� �D7 �����հl(f��)�������̈D ��Ӳ���O(sh��)Ӌ(j��)�в�����CH341T�����D(zhu��n)�Q�·ģ�M���ڣ��������Ӳ����ʹ�ã���Ҫ����λ�C(j��)�а��b�(q��)��(d��ng)�����(q��)��(d��ng)������ԏ��Ͼ��ߺ��������˾�W(w��ng)վ�����d�� 3.2 �o(w��)��ͨ�ų����O(sh��)Ӌ(j��) ���O(sh��)Ӌ(j��)�o(w��)��ͨ�ų���ǰ����Ҫ����CC1110�ĸ��l���֣��Դ_���o(w��)���հl(f��)�����հl(f��)�l�ʡ��l(f��)���ʡ���ݔ�����Լ��{(di��o)�Ʒ�ʽ�ȡ�����CC11 10���l�����^���(f��)�s���@����Բ���TI��˾��SmartRF Studioܛ����(l��i)�M(j��n)�����á�ͨ�^(gu��)�O(sh��)�üĴ���FREQ2��FREQ1��FREQ0��CC1110���հl(f��)�l���x����433MHz�l��;ͨ�^(gu��)�O(sh��)��PA TABLE0��CC1110�İl(f��)�����O(sh��)�Þ�10dBm���@�ӿ�����߰l(f��)����x;����ԓ����ϵ�y(t��ng)��ָ�(sh��)��(j��)���^С�������x���^�͵Ă�ݔ���ʣ����H������߂�ݔ���x�����ҿ��Խ����ܺ�;�{(di��o)�Ʒ�ʽ�x��2-FSK��ʽ�� �o(w��)��ͨ�ų�������o(w��)���l(f��)�ͳ���͟o(w��)�����ճ���ɲ��֡��o(w��)���l(f��)�ͳ���?q��)����l(f��)�͵Ĕ�(sh��)��(j��)ͨ�^(gu��)�o(w��)���ķ�ʽ�l(f��)�ͳ�ȥ���o(w��)�����ճ�����Խ���ͬ�l�ʵİl(f��)��C(j��)�l(f��)�͵Ĕ�(sh��)��(j��)���o(w��)��ͨ�ų������̈D��D8��ʾ�� �D8 �o(w��)��ͨ�ų������̈D 3.3 ָ��l(f��)�Ͷ��������O(sh��)Ӌ(j��) �ڙC(j��)���~(y��)����ϵ�y(t��ng)��ָ��l(f��)�Ͷˣ���(sh��)�F(xi��n)�Ĺ��ܰ��������հl(f��)��(sh��)��(j��)�͟o(w��)���հl(f��)��(sh��)��(j��)��ָ��l(f��)�Ͷ����������̈D��D9��ʾ�� �D9 ָ��l(f��)�Ͷ����������̈D ָ�(sh��)��(j��)�o(w��)���l(f��)���Ժ�ָ��l(f��)�Ͷ��_(k��i)ʼ�ȴ�����ָ���(zh��)�ж˷����Ĕ�(sh��)��(j��)��ָ��l(f��)�Ͷ˽��յ�������(sh��)��(j��)���{(di��o)�ô��ڰl(f��)�ͳ���?q��)������?sh��)��(j��)�l(f��)�ص�PC����������(sh��)��(j��)�cָ�(sh��)��(j��)�Ȍ�(du��)�����������(sh��)��(j��)�c�l(f��)�͔�(sh��)��(j��)һ�£��t�J(r��n)��ָ�(sh��)��(j��)�l(f��)�ͳɹ�����t���°l(f��)��ָ�(sh��)��(j��)������L(zh��ng)�r(sh��)�g�](m��i)�н��յ�������(sh��)��(j��)���t���°l(f��)��ָ�(sh��)��(j��)�� 3.4 ָ���(zh��)�ж��������O(sh��)Ӌ(j��) �ڙC(j��)���~(y��)����ϵ�y(t��ng)ָ���(zh��)�жˣ���Ҫ����ָ�(sh��)��(j��)�Ľ��ա�ָ�(sh��)��(j��)�ķ����l(f��)�͡��惦(ch��)�����x���Լ���C(j��)�Ŀ��Ƶȡ����У���C(j��)�Ŀ���������P(gu��n)�I�IJ��֡��ڿ��ƶ�C(j��)ǰҪ�Ȍ�(du��)ָ�(sh��)��(j��)�M(j��n)�н�����Ӌ(j��)�����C(j��)�Ŀ����������ڶ�C(j��)���ü�(j��)(li��n)�ķ�ʽ��(l��i)ģ���~(y��)�w�Ĕ[��(d��ng)����˶�C(j��)�g�P(gu��n)��(ji��)���\(y��n)��(d��ng)Ҏ(gu��)�ɿ��Բ�������(sh��)�W(xu��)ģ�ͣ� ʽ�У�Ka�����ϵ��(sh��)��Ki��ƫбϵ��(sh��)��f��[��(d��ng)�l�ʣ���i���P(gu��n)��(ji��)����ǣ�Aimax���P(gu��n)��(ji��)�[��(d��ng)���ȣ�t��r(sh��)�g�����υ���(sh��)�����C(j��)����Ҫ���ƅ���(sh��)���ڳ����O(sh��)Ӌ(j��)�^(gu��)���У�һ��ȡKa��0.5��Ki��f����i�Լ�Aimax�Ă�(g��)����(sh��)����(j��)���w���ٶ�ָ��ͷ���ָ���(l��i)Ӌ(j��)�������(y��ng)�Ŀ�������ָ���(zh��)�ж����������̈D��D10��ʾ�� �D10 ָ���(zh��)�ж����������̈D 4 �Y(ji��)���Z(y��) �����O(sh��)Ӌ(j��)�ęC(j��)���~(y��)����ϵ�y(t��ng)ͨ�^(gu��)����ˮ�y(c��)ԇ���ڙC(j��)���~(y��)��ˮ�y(c��)ԇ�A�Σ����ô����{(di��o)ԇ����(du��)�C(j��)���~(y��)�M(j��n)��ֱ�Ӱl(f��)�Ϳ���ָ�(sh��)�(y��n)����(du��)�C(j��)���~(y��)���{(di��o)ֱ��(sh��)��(j��)���桢ֱ���Լ��D(zhu��n)���M(j��n)����ֱ�ӿ��ơ��y(c��)ԇ�Y(ji��)���������C(j��)���~(y��)����ϵ�y(t��ng)������Ч�ؽ�����λ�C(j��)�l(f��)�͵�ָ�(sh��)��(j��)������(zh��)�����P(gu��n)�Ą�(d��ng)�����_(d��)�����^�õĿ���Ч����ͬ�r(sh��)�����ĵ��о��O(sh��)Ӌ(j��)�������M(j��n)һ���о��O(sh��)Ӌ(j��)�����C(j��)���~(y��)�Լ����~(y��)�f(xi��)���ṩ���^�õ�ܛӲ���O(sh��)Ӌ(j��)���A(ch��)�� |