|
作者:Rick Zarr,高速信號與數據路徑技術專家 前言 您的電機是否以預期速度旋轉?閉環(huán)電機控制系統(tǒng)會繼續(xù)回答這個問題,因為只要有電機旋轉的地方就會實施閉環(huán)系統(tǒng),這是一個趨勢。無論終端系統(tǒng)是汽車(采用電腦控制轉向的輔助平行泊車),是人造衛(wèi)星(調整衛(wèi)星角度以鎖定特定信號),還是工廠機械(取放機器),位置反饋傳感器都是總體電機控制系統(tǒng)中的固有元件。電機控制種類多種,本文將討論兩種圍繞位置傳感器實施模擬信號鏈的控制方案:分解器和編碼器。 分解器 在討論分解器信號鏈解決方案之前,首先考慮它的基本工作原理,如圖 1 所示。分解器(這里是一個發(fā)送器單元)由三個不同的線圈繞組構成,即參考、正弦(SIN) 和余弦 (COS) 繞組。參考繞組是一次繞組,其可通過稱之為旋轉變壓器的變壓器,由應用于該變壓器一次側的 AC 電壓勵磁。旋轉變壓器隨后將電壓發(fā)送至變壓器的二次側,因此無需電刷或套環(huán)。這樣可提升分解器的整體可靠性和穩(wěn)定性。 
參考繞組安裝在電機軸上。在電機旋轉時,SIN 和COS 繞組的電壓輸出會隨軸位置發(fā)生變化。SIN 和COS 繞組安裝角度相對于該軸相互相差 90 °。參考繞組旋轉時,參考繞組與 SIN/COS 繞組之間的角度差會發(fā)生變化,可表示為θ旋轉角或圖 1 中的θ。在SIN 和 COS 繞組上感應到的電壓等于參考電壓乘以SIN 繞組和 COS 繞組的θ角。 感應到的輸出電壓波形如圖 2 所示。圖中顯示了 SIN 和 COS 繞組除以參考電壓的規(guī)范化電壓輸出信號。傳統(tǒng)參考電壓通常介于 1 至 26V 之間,而輸出頻率范圍則是 800Hz 至 5 kHz。
現(xiàn)在可以確定對適當信號鏈器件的要求。信號鏈必須為雙極性,因為信號會擺動至接地以下(圖 2)。它必須同時對兩個通道進行采樣,轉換高達 5kHz 的信號,并針對分解器為參考繞組提供 AC 電壓。最佳的解決方案是為兩個通道各實施一個Δ-Σ調制器。Δ-Σ調制器可在極高頻率(在 10 至 20MHz 范圍)下進行采樣,因此經Δ-Σ調制后的輸出要進行平衡和濾波后才可獲得可接受的分辨率。 在提供參考電壓或 AC 勵磁電源時,首選方法是將脈寬調制 (PWM) 信號直接應用于分解器。德州儀器(TI) 針對這種實施方案提供了一種推薦解決方案。數據轉換器(例如 ADS1205 或 ADS1209)是Δ-Σ調制器的首選,因為這兩個器件都能直接連接分解器的SIN 與 COS 繞組。此外,數據轉換器還可連接四通道 sinc 濾波器/積分器,為參考繞組實現(xiàn) PWM 信號發(fā)生器輸出,例如 AMC1210 。最后還需要一個數字信號處理器(DSP) 或實時控制器來處理除電機控制系統(tǒng)外的各種信號。這里可選用TI 基于C28x 的C2000. Piccolo. F2806x 微控制器。圖 3 是一個-典型的信號鏈解決方案。
總之,分解器是一款非常穩(wěn)定的控制系統(tǒng)位置傳感器,不僅支持高精度,而且還可提供很長的使用壽命。分解器的缺點是其最大旋轉速度。由于分解器信號頻率通常小于 5kHz,因此電機速度需要小于5,000 轉每分鐘。 編碼器 與分解器的情況類似,在討論信號鏈實施方案之前,首先要了解編碼器的物理及信號輸出特性。編碼器通常有兩種:線性與旋轉。線性編碼器用于只按一個維度或方向運動的方案,可將線性位置轉換為電子信號,通常與致動器配合使用。旋轉編碼器用于圍繞軸心運動的方案,可將旋轉位置或角度轉化為電子信號。由于旋轉編碼器與電機一起使用(電機圍繞軸心-旋轉),因此本文不涉及線性編碼器。 要理解旋轉編碼器的原理,首先要考慮基本的光學旋轉編碼器。光學編碼器具有支持特定模式的磁盤,安裝在電機軸上。磁盤上的模式既可阻止光,也可允許光通過。因此,還需要使用一個發(fā)光發(fā)送器和一個光電接收器。接收器的信號輸出能夠與電機的旋轉位置相關聯(lián)。 常見的旋轉編碼器有三種:絕對位置值、增量 TTL 信號以及增量正弦信號。對于絕對位置值旋轉編碼器而言,磁盤上的模式可根據其位置分成非常具體的模式。例如,如果絕對位置編碼器具有 3 位輸出,那么它就將具有平均分布的八個不同模式(圖 4)。這是在磁盤上而且是平均分布的,因此每個模式的間距是360°/8 = 45°。現(xiàn)在,對于3 位絕對位置值旋轉編碼器而言,可以判斷 45°范圍內的旋轉電機位置。
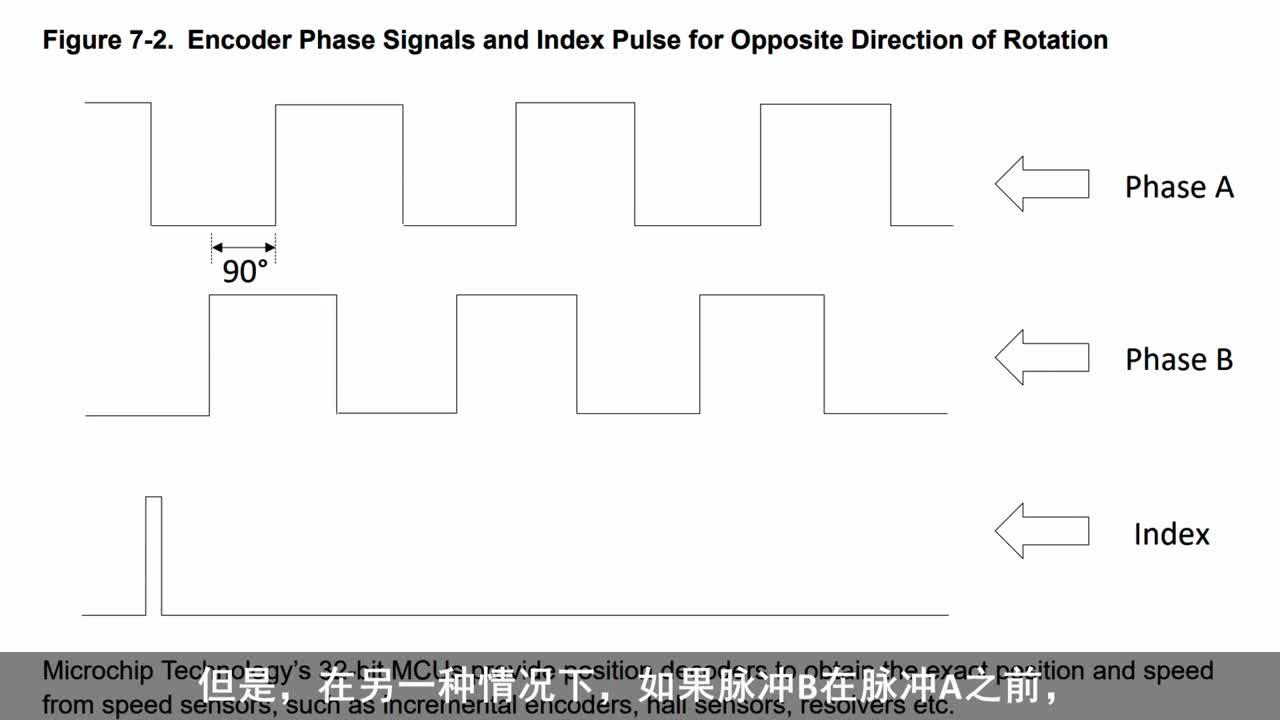
絕對位置值旋轉編碼器的輸出已針對數字接口進行了優(yōu)化,因此不需要模擬信號鏈。 對于增量 TTL 旋轉編碼器而言,磁盤上的模式輸出數字高或數字低,即 TTL 信號。如圖 5 所示,TTL 輸出磁盤的模式與絕對位置值旋轉編碼器相比比較簡單,因為它只需表現(xiàn)數字高或數字低。除了 TTL 信號外,還有一個對于確定電機當前旋轉位置很重要的參考標記。可將參考標記視作 0°角度。因此,對數字脈沖進行簡單計數即可確定電機的確切旋轉位置。
圖 5 顯示了電機軸一次旋轉中的多個周期。編碼器制造商可提供每轉 50 至 5,000 個周期的增量 TTL 旋轉編碼器(和增量正弦旋轉編碼器)。與絕對位置值旋轉編碼器一樣,輸出已經是數字格式,因此不需要模擬信號鏈。 對于增量正弦旋轉編碼器而言,輸出和磁盤模式與TTL 信號編碼器非常相似。顧名思義,其輸出不是數字輸出,而是正弦波輸出。實際上,它具有正弦及余弦輸出以及參考標記信號,如圖 6 所示。這些輸出都是模擬信號,因此需要模擬信號鏈解決方案。
與增量 TTL 輸出類似,在一次旋轉中有多個信號周期。例如,選擇單次旋轉有 4,096 個周期的編碼器連接以6,000 轉每分鐘的速度旋轉的電機,所得的正弦和余弦信號頻率計算如下。
本實例中的=信號鏈解決方案需=要具備至少 410kHz 的帶寬。由于這是閉環(huán)控制系統(tǒng),因此必須將時延控制在最小范圍內或者完全消除。通常,編碼器輸出為1Vp-p,而且正弦和余弦輸出是差分信號。 對模擬信號鏈解決方案的典型要求是: . 兩個同時采樣的模數轉換器(ADCs):一個用于正弦波輸出,一個用于余弦波輸出。 . 無系統(tǒng)時延:需要 400kHz 以上的帶寬,因此 · ADC 必須最少能處理每通道 800 kSPS 的速率。 · 支持 1V 左右滿量程的 1-Vp-p 差分輸入可優(yōu)化ADC 的滿量程范圍或 ADC 滿量程范圍的輸入信號放大。 · 一個參考標記信號比較器。 TI 的最佳解決方案是 ADS7854 系列逐次逼近寄存器(SAR) ADCs(圖 7)。這種 SAR-ADC 具有兩個同步采樣通道、一個內部參考和 1-MSPS 的每通道輸出數據速率,可滿足特定需求。它與比較器及全差分放大器聯(lián)用,可驅動 ADC。
ADS7854 是一個= 14 位 ADC,如果正弦增量旋轉編碼器在單次旋轉中具有 4,096 個周期,那么測量步進的總數可通過以下方式計算。
這樣可在實施該方案時為設計人員提供 26 位的分辨率,或不足 5.36 × 10–6 度的旋轉位置誤差精度。 結論 電機控制反饋路徑中的旋轉/位置傳感器有兩種常用實施方案:分解器和編碼器。我們從模擬信號鏈角度針對分解器或編碼器對幾個控制系統(tǒng)的反饋路徑和輸出信號特性進行了評估,以確保信號完整性和最佳性能。 |