|
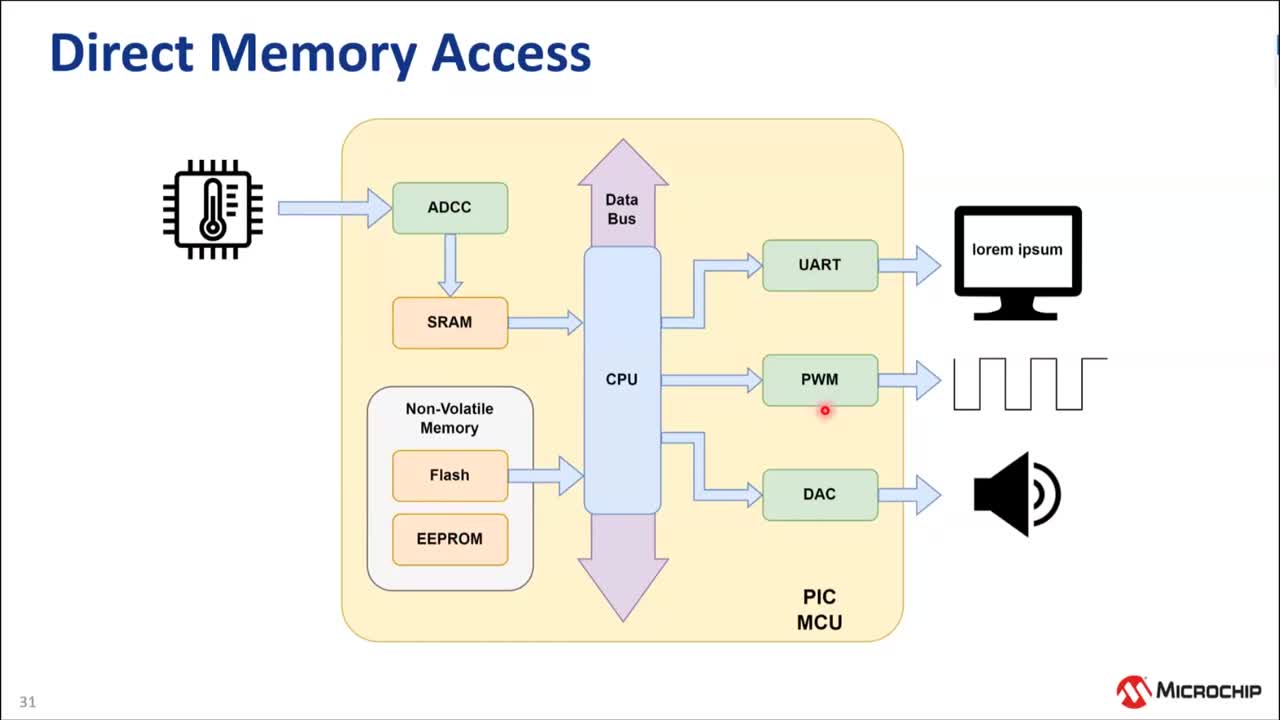
引言 CAN總線由于具有實時性和可靠性高、組網(wǎng)成本低等優(yōu)點,近年來在汽車工業(yè)、樓宇自動化、工廠自動化、機器人控制等領(lǐng)域得到廣泛應用。CANopen協(xié)議不僅定義了通信規(guī)范,而且為可編程系統(tǒng)、不同器件、接口等設(shè)備應用子協(xié)議定義了大量的行規(guī)。遵循CANopen協(xié)議開發(fā)出的設(shè)備能實現(xiàn)不同生產(chǎn)廠家的產(chǎn)品間的互操作。 要掌握CANopen協(xié)議,重點是對對象字典和設(shè)備模型的理解以及對4類通信對象的掌握。本文先對CANopen協(xié)議進行削析,再重點介紹在 PICl8F458單片機上開發(fā)基于CANopen協(xié)議的節(jié)點,最后通過溫度測控系統(tǒng)實驗驗證了系統(tǒng)信息傳遞的可靠性、準確性和實時性。 1 CANopen通信協(xié)議簡介 CANopen協(xié)議是CiA協(xié)會基于CAN總線定義的應用層協(xié)議之一,在各種控制系統(tǒng)中得到了廣泛應用。它以CAN芯片為硬件基礎(chǔ),有效利用CAN芯片所提供的簡單通信功能來滿足工業(yè)控制網(wǎng)絡(luò)的復雜應用層協(xié)議要求。CANopen網(wǎng)絡(luò)是主從站(Master—Slave)結(jié)構(gòu),系統(tǒng)的運行由主站控制,主站可以對127個從設(shè)備進行控制,不同設(shè)備通過CAN總線進行連接組網(wǎng)。圖1為CANopen設(shè)備模型。CANopen通信協(xié)議接口用于提供在總線上收發(fā)通信對象的服務(wù),不同CANopen設(shè)備間的通信都是通過交換通信對象來完成的。CANopen協(xié)議中定義了4種通信對象(通信模式),用于對不同作用的信息進行處理:NMT對象(網(wǎng)絡(luò)管理對象)、SDO對象(服務(wù)數(shù)據(jù)對象)、PDO對象(過程數(shù)據(jù)對象)、特殊功能對象。 
設(shè)備對象字典是CANopen協(xié)議的核心概念,位于CANopen設(shè)備模型中通信層和用戶應用層之間,為用戶應用層提供接口。它是一個結(jié)構(gòu)標準化的、有序的對象組,描述了該設(shè)備使用的所有數(shù)據(jù)類型、通信對象和應用對象。基于CANopen協(xié)議的網(wǎng)絡(luò)系統(tǒng)中每一個設(shè)備都要實現(xiàn)一個唯一的對象字典,區(qū)別在于設(shè)備類型不同其內(nèi)容則不同。對象字典中每個對象擁有一個唯一的16位主索引和8位子索引,由此實現(xiàn)對其中各種對象的訪問。對象字典在系統(tǒng)軟件設(shè)計中得以實現(xiàn),然后使用標準化的EDS文件對其進行描述。 2 溫度測控系統(tǒng)的軟、硬件設(shè)計 2.1 溫度測控系統(tǒng)組成 圖2所示溫度測控系統(tǒng)包含3個節(jié)點,它們構(gòu)成一個CAN網(wǎng)絡(luò)。傳感溫度節(jié)點發(fā)送測到的溫度,此節(jié)點由主芯片和溫度傳感器組成。溫度調(diào)節(jié)節(jié)點接收到從傳感溫度節(jié)點發(fā)送的溫度數(shù)據(jù)后,低于下限溫度加熱,高于上限溫度降溫,并發(fā)送調(diào)節(jié)狀態(tài);此節(jié)點由主芯片、狀態(tài)顯示燈和空調(diào)設(shè)備組成。命令節(jié)點接收從傳感溫度節(jié)點發(fā)送的溫度和溫度調(diào)節(jié)節(jié)點發(fā)送的狀態(tài)在液晶屏上顯示,并有按鈕可以發(fā)送NMT對象,對整個系統(tǒng)進行控制;此節(jié)點由主芯片、液晶屏、狀態(tài)顯示燈和按鈕組成。
針對系統(tǒng)的要求,選用PICl8F458單片機作為從節(jié)點的主芯片。它是Microchip公司的單片16位高性能微控制器,具有片內(nèi)CAN控制器,CAN模塊符合CAN2.0B標準,帶有3個發(fā)送緩沖區(qū)、2個接收緩沖區(qū)、2個接收屏蔽寄存器、6個完全接收濾波器。CAN收發(fā)器采用 PCA82C250芯片,它具有高速穩(wěn)定的差動發(fā)送和接收能力,可作為CAN協(xié)議控制器和物理總線接口。此外,為了便于調(diào)試和與主控制器的通信,系統(tǒng)中還擴展了RS232接口。
對于各個節(jié)點都采用預定義連接集中規(guī)定的11位ID。它由4位功能碼和7位節(jié)點ID組成。其中各通信對象具體分配的COB—ID為NMT SERVICE一000、EMER—GENCY一080、TIMESTAMP一100、SYNC一080、TPD01—180、RPD01—200、 TPD02—280、RPD02—300、TSDO一580、RSDO一600、HEARTBEAT一700。 設(shè)定傳感溫度節(jié)點的ID為6,以TPDO對象方式發(fā)送測到的溫度。所以發(fā)送對象的COB—ID分別為TP—D02(200+6)、TSD() (580+6)、HEARTBEAT(700+6)、EMERGENCY(080+6),接收對象的COB—ID分別為NMT SERVICE(000)、RSD()(600+6)。 設(shè)定溫度調(diào)節(jié)節(jié)點的ID為7,以RPDO對象方式接收從傳感溫度節(jié)點發(fā)送的溫度,并以TPDO對象方式發(fā)送調(diào)節(jié)狀態(tài)。所以發(fā)送對象的COB—ID分別為 TPD01(180+7)、TSDO(580+7)、HEARTBEAT(700+7)、EMERGENCY(080+7),接收對象的COB—ID分別為NMT SERVICE(000)、RSDO(600+7)、RPDO2(280+6)。 設(shè)定命令節(jié)點的ID為8,以RPDO對象方式分別接收從傳感溫度節(jié)點發(fā)送的溫度和從溫度調(diào)節(jié)節(jié)點發(fā)送的調(diào)節(jié)狀態(tài),也可用NMT對象方式發(fā)送NMT報文。所以發(fā)送對象的COB—ID分別為TSDO(580+8)、HEART—BEAT(700+8)、EMERGENCY(080+8)、NMT MAS—TER(000),接收對象的COB—ID分別為NMT SERVICE(000)、RSD0(600+8)、RPD02(280+6)、RPD01(180+7)。 2.2 節(jié)點對象字典的建立 對象字典的內(nèi)容除了包括CANopen協(xié)議規(guī)定的必需項外,還包括調(diào)用的各功能模塊和參數(shù)設(shè)定項。它的正確配置和使用,是保證整個 CANopen網(wǎng)絡(luò)正常運行的核心,是節(jié)點實現(xiàn)其預定功能的必要保證。對象字典的組建采用C語言在頭文件中編寫,通過Struct(結(jié)構(gòu))語句實現(xiàn)對象字典內(nèi)容的尋址。對象字典的規(guī)劃賦值設(shè)計按照CANopen協(xié)議規(guī)定的格式完成,每個節(jié)點的對象字典都具有相同的結(jié)構(gòu),但具體內(nèi)容要根據(jù)不同的設(shè)備而定義,包含了描述這個設(shè)備和它網(wǎng)絡(luò)的所有參數(shù)。對象字典的操作是CANopen協(xié)議軟件的核心,通過對象字典實現(xiàn)網(wǎng)絡(luò)間參數(shù)的映射從而完成各種數(shù)據(jù)的處理,需要編寫對象字典解碼子函數(shù)、讀對象字典子函數(shù)和寫對象字典子函數(shù)。下面以溫度調(diào)節(jié)節(jié)點為例介紹對象字典的創(chuàng)建、賦值和具體操作。表1顯示了此節(jié)點中PDO的各個參數(shù)。 OD_ENTRY(0x3000,Ox00,ATTR_RW | ATTR_ROM,TempLo),(對象主索引3000-下限溫度)OD_ENTRY(0x3001,0x00,ATTR_RW|ATTR_ROM,TempHi),(對象主索引3001-上限溫度) OD_ENTRY(0x3100,0x00,ATTR_RO,Status),(對象主索引3100一狀態(tài)) OD_ENTRY(0x3200,0x00,ATTR_RWW,RemoteTemperature),(對象主索引3200-遠程溫度)#define ODD_RPDO_PAR_COB_ID_0 Ox40000286L(RPDO的COB-ID為0x286) OD_ENTRY(0x160l,0x00,ATTR_RO | ATTR_ROM,ODE_RPDO_Mapping_NoOfEntries),OD_ENTRY(0x1601,0x01,ATTR_RO|ATTR_ROM,ODD_RPDO_MAP_0_1, (RPDO映射參數(shù)描述) #define ODD_RPDO_MAP_0_1 0x32000010L(RPDO定位對象字典索引3200子索引00長度2) OD_ENTRY(0xlA00,0x00,ATTR_RO|ATTR_ROM,ODE_TPDO_Mapping_NoOfEntries), OD_ENTRY(0xlA00,0x01,ATTR_RO|ATTR_ROM,ODD_TPD0_MAP_0_l,(TPDO映射參數(shù)描述) #define ODD_TPDO_MAP_0_1 0x31000008L(TP-DO定位對象字典索引3100子索引00長度1) if(RemoteTemperature else{Status=0;}(在設(shè)定溫度范圍內(nèi),為保持狀態(tài)) 在此例中,PDO報文是在對象字典中用通信參數(shù)和映射參數(shù)來描述的。通信參數(shù)決定哪個COB—ID將被PDO使用,此例中RPD0的COB—ID為 286,TPDO的COB—ID為187。映射參數(shù)包含映射到PDO里的對象在對象字典中的索引和子索引,以及對象的數(shù)據(jù)長度。此例中映射到RPDO里的對象在對象字典中的索引為3200,子索引為OO,長度為2;映射到TPDO里的對象在對象字典中的索引為3100,子索引為00,長度為1。另外某些相關(guān)變量也由對象字典所描述,可以通過sD0對象傳輸方式進行下載修改或上傳觀察。此例中的上限溫度、下限溫度,就由對象字典主索引3000、子索引00和主索引3001、子索引00分別描述。 2.3 節(jié)點的CANopen協(xié)議的軟件實現(xiàn) 在節(jié)點上實現(xiàn)CANopen協(xié)議軟件,首先要實現(xiàn)節(jié)點接收報文和發(fā)送報文的功能。接收報文的過程是,一旦有接收中斷產(chǎn)生,就把CAN接收緩沖區(qū)接收到的數(shù)據(jù)和地址放到一內(nèi)部陣列中,對接收到的報文進行分析,并送去執(zhí)行相應的子函數(shù)(NMT報文接收處理子函數(shù)、SDO報文接收處理子函數(shù)、心跳報文接收處理子函數(shù)、SDO報文接收處理子函數(shù)),最后返回主程序。發(fā)送報文的過程是,把需要發(fā)送的變量放到對象字典里,再把它們映射封裝成相應的對象,最后將報文發(fā)送到總線上。 主程序按照通信流程編寫,模塊上電后先進行通信初始化。其首先初始化CANopen協(xié)議中的通信相關(guān)參數(shù)、對象字典、節(jié)點號,再初始化CAN控制器的硬件,包括單片機的內(nèi)部寄存器、定時器、串行口、CAN控制器。通信初始化后自動進入節(jié)點初始化,并進行一些特定用戶的初始化。完成后,發(fā)送一個啟動報文自動進入預操作狀態(tài)。此時用戶的程序循環(huán)執(zhí)行著,在每個循環(huán)里,調(diào)用接收報文1次。這個模塊用來檢查接收到的對象,并作相應的處理。在NMT報文到來之前一直持續(xù)在預操作狀態(tài)。在 這個狀態(tài)里,節(jié)點可以通過SD0被配置和設(shè)置參數(shù),但是不允許發(fā)送PDO。在相應的NMT報文到來后,即收到啟動遠程節(jié)點命令后,進入操作狀態(tài),在這個狀態(tài)就可以進行正常的通信了。在收到NMT報文,即停止遠程節(jié)點命令,節(jié)點進入了停止狀態(tài),從而停止PDO和SDO通信。 3 實驗結(jié)果 在軟件設(shè)計中編寫了與上位機的通信模塊程序,可以將每個節(jié)點接收和發(fā)送報文的ID號、數(shù)據(jù)長度、數(shù)據(jù)轉(zhuǎn)發(fā)到串口,便于上位機進行觀測。 圖3為系統(tǒng)傳輸數(shù)據(jù)的過程,溫度傳感節(jié)點發(fā)送報文過程為發(fā)送自啟動報文后以周期為1 s發(fā)送心跳報文,以周期為100 ms發(fā)送PDO1報文,發(fā)送數(shù)據(jù)為傳感溫度(分別為19°,20°,…,21°…)。上限溫度和下限高溫都為20°時,溫度調(diào)節(jié)節(jié)點接收報文過程為接收到 NMT報文命令后進入操作狀態(tài),不斷接收PDOl報文。溫度調(diào)節(jié)節(jié)點發(fā)送報文過程為發(fā)送自啟動報文后以周期為1 s發(fā)送心跳報文,以事件觸發(fā)方式發(fā)送PDOO報文(發(fā)送數(shù)據(jù)為工作狀態(tài)長度為1,當接收到的溫度低于20°時發(fā)送數(shù)據(jù)為02表示加熱,當接收到的溫度高于 20°時發(fā)送數(shù)據(jù)為01表示降溫,當接收的溫度為20°時發(fā)送數(shù)據(jù)為OO表示保持),狀態(tài)顯示燈不斷閃爍紅色、黃色、藍色。如在命令節(jié)點中發(fā)送SDO報文改變對象字典中的上限溫度和下限溫度,再觀察各節(jié)點變化。情況1,當上限溫度低于20°(為15°)時,溫度調(diào)節(jié)節(jié)點一直在降溫狀態(tài),狀態(tài)顯示燈為紅色。情況2,當下限溫度高于20°(為25°)時,溫度調(diào)節(jié)節(jié)點一直在加熱狀態(tài),狀態(tài)顯示燈為黃色,情況3,當上限溫度高于20°(為25°),下限溫度低于 20°(為15°)時,溫度調(diào)節(jié)節(jié)點一直在保持狀態(tài),狀態(tài)顯示燈為藍色。命令節(jié)點在液晶顯示屏中顯示實時溫度,在狀態(tài)顯示燈中顯示實時狀態(tài)。
命令節(jié)點進行NMT對象操作時再觀察各節(jié)點狀態(tài):當按下按鈕1時,節(jié)點進入欲操作狀態(tài);當按下按鈕2時,節(jié)點重啟。 從以上兩個實驗可以看出,整個系統(tǒng)在運行過程中達到了滿意的控制效果,實現(xiàn)了基于CANopen協(xié)議的對象數(shù)據(jù)的交換,通信傳輸理想。 結(jié)語 應用PIC18單片機自行開發(fā)的基于CANopen協(xié)議的節(jié)點,實現(xiàn)了對4種通信對象信息的通信處理,并通過測試驗證了系統(tǒng)信息傳遞的可靠性、準確性和實時性,很好地滿足了基于CANopen協(xié)議的溫度測控系統(tǒng)的要求;對于CANopen在國內(nèi)的應用和普及,以及CAN網(wǎng)絡(luò)和驅(qū)動產(chǎn)品盡早和國際接軌,具有重要的意義。 參考文獻 1. 鄧遵義 CANopen 協(xié)議剖析及其在伺服電機控制中的實現(xiàn) [期刊論文] -機電工程2007(24) 2. CANopen high-level protocol for CAN-bus H.Boterenbrood NIKHEF 2000 3. 馬凱歌 基于DSP 的CANopen通信協(xié)議的實現(xiàn) [期刊論文] -微計算機信息2006 4. Microchip Technology Inc PICI8F458 英文手冊 2003 作者:廣西大學 蔣智康 宋春寧 宋紹劍 來源:單片機與嵌入式系統(tǒng) 2008(9) |