|
作者:Microchip Technology公司家電解決方案部首席應用工程師 Padmaraja Yedamale 對于大多數家用電器制造商,提高電器效率和降低可聞噪聲是最優先考慮的事項。通常,政府通過嚴格的法規來推動對效率的要求。然后,有一些消費者會愿意引領潮流,以相對較高的價格購買“更綠色”的電器。這驅使電器制造商研究相應的解決方案,解決效率和可聞噪聲方面的問題,同時讓增加的整體系統成本保持最低。例如,電器制造商希望設計出可以快速響應速度變化(包括洗滌和甩干兩個過程)的洗衣機。一些高級電機控制技術,如磁場定向控制(FOC),也稱為矢量控制,有助于設計出更加安靜節能的洗衣機。 洗衣機控制拓撲 本文主要關注如何部署FOC來設計高效、安靜的洗衣機。通過分析洗衣機的構造,可以了解為什么需要高效的電機控制技術。如圖1所示,最新型的洗衣機帶有一個滾筒單元,該結構由BLDC電機或PMSM電機、電機控制器電路板、帶按鍵用戶界面電路板和顯示單元組成。控制器電路板和用戶界面電路板可以使用串行鏈路(如UART、SPI或專有串行協議)進行通信,用以設置所需的洗滌負載、漂洗速度,以及處理其他命令。根據所接收到的命令,電機控制器電路板會調整電機速度和扭矩。電機是洗衣機中最主要的用電部件,用電量可達總用電量的85%。因此,對于PMSM控制的任何改進,都可以顯著節省用電和成本。為此,高效的電機控制對于設計更好的電器非常關鍵。 
圖1新型洗衣機的構造 新型信號控制器促進電器設計 半導體技術的發展促進了數字信號控制器(DSC)和功率電子開關的產生,它們可以用于設計變速電機。實際上,得益于DSC高效而高成本效益的電機功率管理,電器不再需要局限于使用一些定制的硬件和控制技術。例如,借助Microchip最新一代的dsPIC DSC系列,電器制造商現在可以設計出顯著節省用電和成本的電機系統。這是因為dsPIC DSC上包含專用于電機控制應用的外設。這些外設包括電機控制脈寬調制(MCPWM)、高速ADC和可擴展閃存程序存儲器。 此外,dsPIC DSC的DSP引擎還支持必需的快速數學運算,用于執行需要大量計算的控制循環。本文將討論如何通過dsPIC DSC使用FOC算法來控制洗衣機中的電機。在洗衣機中,dsPIC DSC用作電機控制電路板上的信號控制器。用戶界面模塊可以采用8位單片機(MCU)進行處理,如Microchip的PIC16或PIC18系列MCU,可以針對三相感應電機(ACIM)、三相無刷直流(BLDC)電機或永磁同步電機(PMSM)分別實現FOC算法。由于構造方面的原因,PMSM電機的效率比ACIM電機高。以下將特別討論無傳感器FOC算法對于洗衣機中的PMSM電機是如何工作的。 為什么使用FOC算法?傳統的BLDC電機控制方法以六步方式驅動定子,會導致輸出轉矩出現振蕩。在六步控制方式中,先對兩個繞組通電,直到轉子到達下一個位置,然后電機換向到下一步。霍爾傳感器用于確定轉子位置,以便對電機進行電子換向。高級無傳感器FOC算法使用定子繞組中產生的反電動勢來確定轉子位置。六步控制(也稱為梯形控制)的動態響應本身就不適合用于洗衣機控制,因為一個洗滌周期中的負載會動態變化,并且實際負載還會因洗滌量和所選洗滌周期的不同而變化。此外,在前開式洗衣機中,當負載位于滾筒頂側時,電機負載要克服重力做功。只有高級算法(如FOC)可以處理這些動態負載變化。 FOC原理 FOC算法會產生矢量形式的3相電壓,用于控制三相定子電流。通過使用Park和Clarke變換將物理電流變換為旋轉矢量,轉矩和磁通分量不會隨時間變化(時間不變性)——使得可以與直流電機一樣,使用諸如比例積分(PI)控制器之類的傳統技術來進行控制。根據設計,在有刷直流電機中,定子磁通和轉子磁通之間的角度保持為90°,從而使電機產生可能的最大轉矩。通過使用FOC技術,電機電流變換為2軸矢量,就如直流電機中的電流。此過程的第一步是測量三相電機電流。在實際測量中,由于3個電流值的瞬時和為0,所以只需測量其中兩個電流,就可以確定第三個電流的值。此外,由于只需要兩個電流傳感器,因此還可以降低硬件成本。 Clarke變換 第一個變換稱為Clarke變換,將以定子作為參照物的3軸二維坐標系轉換為2軸坐標系,并保持相同的參照物。如圖2所示,其中,Ia、Ib和Ic是各個相電流。
圖2 Clarke變換 此時,定子電流相量可以在使用α-β軸的2軸正交坐標系上表示。下一步是變換為另一個2軸坐標系,稱為d-q軸坐標系,它會隨轉子磁通而旋轉,通過圖3所示的Park變換實現。
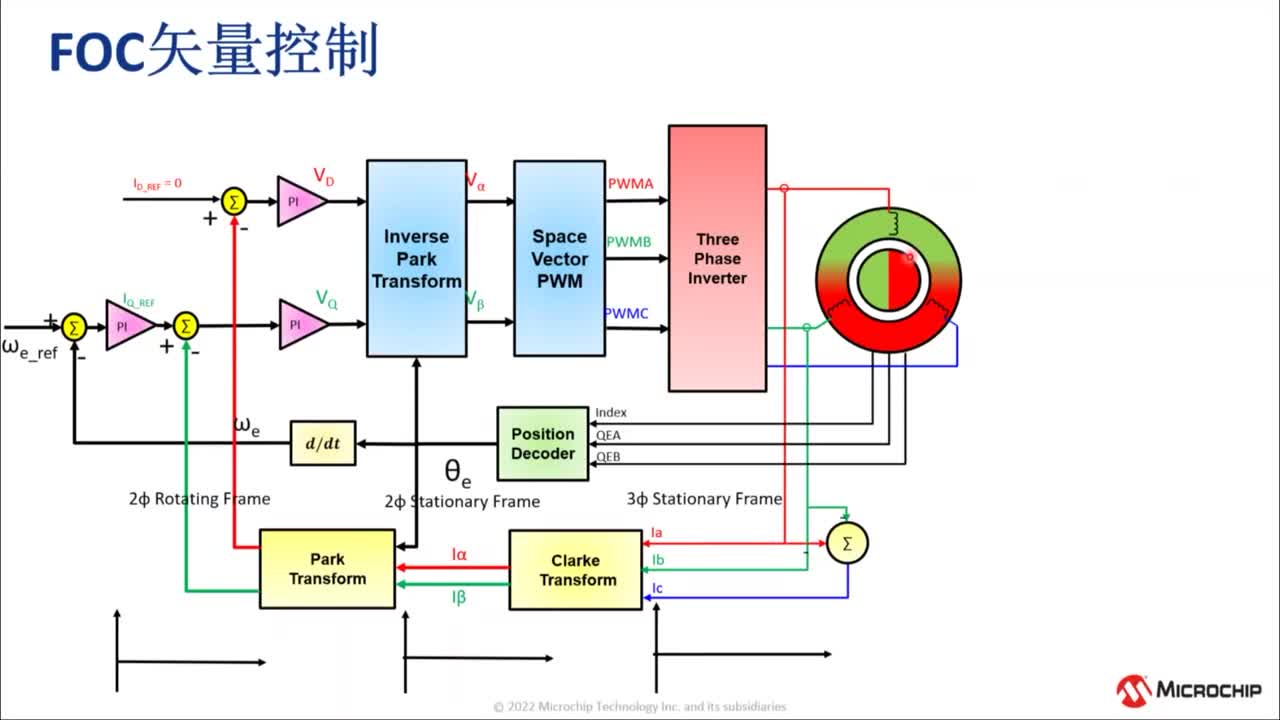
圖3 Park變換 當正弦輸入電流施加到定子上時,會產生旋轉磁通。轉子的速度與旋轉磁通矢量直接相關。磁通矢量必須始終與轉子磁極保持對齊,以使電機產生最大的轉矩。 圖4給出了整個過程的圖示,包括坐標變換、PI迭代、逆變換和產生PWM,還描述了FOC控制所需的功能。誤差信號根據Id、Iq和各自的參考值而產生。Id參考電流控制轉子磁通。請記住,只有在負載穩定的條件下,Id和Iq(代表轉矩和磁通)才具有時間不變性。Iq參考電流控制電機的轉矩輸出。PI控制器的輸出提供Vd和Vq,它們構成發送到電機的電壓矢量。新的變換角根據由Park逆變換產生的電壓和由Park變換產生的電流進行估計。
圖4 采用無傳感器FOC算法控制的直接驅動洗衣機PMSM電機的應用框圖 FOC算法使用新的變換角來確定下一個電壓矢量的位置。通過使用新的變換角,PI控制器的Vd和Vq輸出值被旋轉變換到靜止參考坐標系。該計算產生正交電壓值vα和vβ。下一步,對vα和vβ值進行逆變換,得到三相值va、vb和vc。三相電壓值用于計算新的PWM占空比值,產生所需的電壓矢量。 在FOC算法中,三相分離的PWM信號使用空間矢量調制(SVM)進行正弦波調制,并施加到電機的三相繞組。通過使用分流電阻,可以監視每個繞組中的電流,并將電流與基于電機特性的電氣模型進行比較。電機供應商會提供電機的繞組特性,雖然它們也可以使用繞組的電感和電阻值進行測量。轉子位置通過基于電機模型間接測量反電動勢(EMF)來計算。通過推導等于測量電流的估算電流,可以基于電機模型計算得到反電動勢。 采用FOC方法可以為PMSM電機功率管理帶來許多好處。例如,FOC可以改善PMSM電機的動態響應,為諸如洗衣機之類需要快速響應速度變化(洗滌和甩干過程中)的電器帶來好處。FOC支持以較低的電流產生最佳的轉矩,因為它可以控制電流的幅值和相位,并使定子和轉子磁場之間的角度保持90°。此外,由于FOC支持在每個PWM周期中控制電機電流,所以可以從根本上限制電流。 數字信號控制器讓電機控制變得簡單 dsPIC等先進的DSC使電器設計師可以改善電機系統。若采用無傳感器FOC算法,DSC將非常適合于控制PMSM電機。這是因為dsPIC DSC及其片上外設可以高效地執行FOC算法,實現在PMSM電機中檢測轉子位置的無傳感器方法。dsPIC DSC快速而靈活的ADC支持電流檢測,并提供了一些很有用的觸發選項。例如,可以通過PWM模塊觸發ADC轉換,從而支持低成本的電流檢測電路:在特定的時間,開關晶體管允許電流流過檢測電阻,由檢測電阻對輸入電流進行檢測。關鍵的是,dsPIC DSC的ADC具有同時捕捉多個信號的能力。通過這種功能,可以消除電機電流測量中,兩個相電流采樣之間的延時。 DSC的電機控制算法基于FOC算法來確定PWM占空比和輸出模式。PWM最重要的功能是帶可編程死區的互補通道。PWM可以采用邊沿對齊或中間對齊。中間對齊PWM的優點是可以降低電器控制系統發射的電磁噪聲(EMI)。 dsPIC DSC系列的所有器件均提供了故障和診斷接口,它們包含一些輸入線,可以在系統發生嚴重故障時關閉PWM。例如,如果洗衣機的攪拌器由于滾筒中衣物纏繞而受阻,應阻止電機繼續旋轉,否則衣物可能會被撕裂。這種阻塞會表現為電機控制系統的過電流現象而被檢測到,并通過使用故障引腳關閉電機進行響應。通過添加診斷功能,可以記錄和/或顯示這些類型的故障,或者將它們傳送到計算機中進行進一步的故障排除。這是非常重要的功能,因為它可以幫助防止硬性故障和縮短產品停機時間。 洗衣機系統設計 基于前面概述的FOC電機控制概念,現在可以討論基于dsPIC DSC的洗衣機系統設計。圖5給出了電機控制系統的框圖。可以通過以下方式設計用于電器的可變電源:首先,使用單相二極管橋式整流器將交流電源轉換為直流。電壓紋波使用一組電容濾除。該直流電壓經過逆變,轉換為具有可變頻率的可變電壓,并送到電機電源線。通過使用PWM技術,直流母線被調制為從逆變橋輸出正弦電壓。
圖5 基于dsPIC DSC的洗衣機的系統框圖 輸入轉換器部分中的整流橋將來自墻式電源插座的交流電壓轉換為直流電壓。根據電器的類型,可能還會有EMI抑制模塊。通常,使用NTC(負溫度系數)電阻來防止涌入電流。高壓尖峰使用金屬氧化物變阻器(MOV)進行抑制。在二極管整流橋的輸出端,使用一組電容來濾除直流紋波。 此外,輸入轉換器部分還具有有源PFC(功率因數校正)模塊,使電路能符合一些歐洲能源法規。該有源PFC模塊由一個電感、一個功率開關和一個二極管組成。DSC的ADC用于測量來自直流母線的電流和電壓值。基于這些輸入,DSC使用PWM模塊來控制功率開關。實現方法是在DSC中執行PID循環,使PF值保持接近于1。 輸出逆變器部分具有一個電壓源逆變器,每個相位對應有兩個功率開關,每個開關的兩端均連接有續流二極管。電機繞組連接到開關的中間位置。來自“輸入轉換器模塊”的直流電壓使用該輸出逆變器進行合成,獲得用于控制電機的變壓變頻電源。 DSC與洗衣機的接口 通過訪問DSC的專用片上外設,可以簡便地實現控制算法。圖6給出了基于dsPIC DSC控制器的洗衣機接口示例。DSC的ADC通道可以用于測量電機電流、電機溫度和散熱器溫度(連接到功率開關)。根據應用的需求,還可以使用其他ADC通道來測量溫度或電流。
圖6 在洗衣機中用作系統控制器的DSC 通用I/O用于接口開關和LCD或LED顯示。在一些應用中,系統可以使用單個控制器來同時處理電機和系統控制。此外,還可以使用dsPIC DSC上的串行端口進行系統校準,以及診斷系統中的任意故障。 保護電器IP 在當今的全球化設計環境中,可能會有多個設計團隊分布在多個設計地點,共同協作設計一系列電器。例如,用于洗衣機控制的FOC可能在地點A開發;面板設計和電子設計可能在地點B進行;而在地點C,系統集成商對電器進行最終的組裝和測試。所有這些設計團隊將具有自己唯一的IP,并希望自己的IP可以受到保護。由于預期到這種需求,dsPIC DSC系列提供了CodeGuard安全功能,它支持在需要進行協作設計的環境中保護IP。 結論 通過在電器設計中使用DSC,可以實現高效的無傳感器FOC算法。通過采用FOC,在PMSM電機應用中,可以實現高達95%的高效率。此外,由于FOC可以協助控制定子電流,從而極大地減少了轉矩紋波,所以可以設計出更安靜的洗衣機。這可以幫助節省用電,響應動態負載變化,同時降低可聞噪聲。  120820_tg.pdf
(399.26 KB)
120820_tg.pdf
(399.26 KB)
|