|
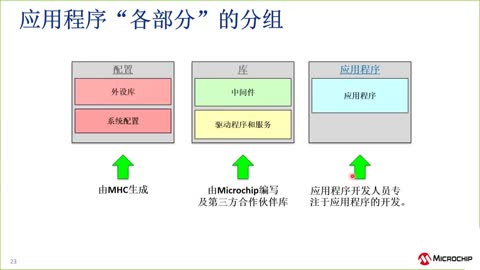
1 主從式多機通信 所謂主從式多機系統,即在數個ARM(或單片機)中,有一個是主機,其余的為從機。從機要服從主機的調度、支配,其拓撲結構如圖1所示。 主機信息可以發到各個從機,從機發送的信息只能被主機接收,從機之間不進行通信。 51單片機串口不同尋常的特征是包括第9位方式(在串口模式2和模式3下)。它允許把在串行口通信增加的第9位用于標志特殊字節的接收。一般約定第 9位為高時表示該字節為地址字節,第9位為低時為數據字節。第9位方式允許接收單片機信息,僅當字節具有一個第9位時才能被中斷。用這種方式,主機首先廣播1字節,并讓其第9位為高,同時收到該字節的各個從機,只有地址相符的打開,以接收后面的數據字節。所接續的數據字節(第9位為低)不能引起其他從機中斷,因為未送它們的地址。 
51單片機用9位方式多機通信時,串口模式必須在方式2或方式3。 其實現多機通信的原理和工作過程如下:作主機的8051的SM2應設定為O,作從機的sM2設定為1。主機發送并被從機接收的信息有兩類:一類是地址,用于指示需要和主機通信的從機地址,由串行數據第9位為“1”來標志;另一類是數據,由串行數據第9位為“0”來標志。由于所有從機的SM2=1,故每個從機總能在R1=O收到主機發來的地址(因為串行數據的第9位為“l”),并進入各自的中斷服務程序。在中斷服務程序中,每臺從機把接收到的從機地址和它的本機地址(系統設計時所分配)進行比較。所有比較不相等的從機均從各自的中斷服務程序中退出(SM2仍為1),只有比較成功的從機才足被主機尋址通信的從機。被尋址的從機在程序中使SM2=0,以便接收隨之而來的數據或命令(RB8=0)。上述過程進一步歸結如下: ①主機的SM2為O,所有從機的SM2=1,以便接收主機發來的地址。 ②主機給從機發送地址時,第9數據位應設置l,以指示從機接收這個地址。 ③所有從機在SM2=1、RB8=1和RI=O時,接收主機發來的從機地址,進入相應中斷服務程序,并與本機地址相比較,以便確認是否為被尋址從機。 ④被尋址從機通過指令清除SM2,以便正常接收數據,并向主機發回接收到的從機地址,供主機核對。未被尋址的從機保持SM2=1,并退出各自中斷服務程序。 ⑤完成主機和被尋址之間的數據通信,被尋址從機在通信完成后重新使SM2=l,并退出中斷服務程序,等待下次通信。 從以上8051實現9位方式多機通信的過程可見,關鍵問題在于: ①發送端(主機)如何發送第9位,并且可編程設置1或O; ②接收端(從機)如何接收到這第9位,并判斷出是l還是0。 以上問題,8051串口可通過控制寄存器SCON中的TB8、RB8和SM2位的設置和讀取輕松解決,但在ARM中并沒有與805l類似功能的寄存器。那么ARM7多機系統怎樣實現如上9位方式多機通信呢?下面通過分析ARM串口(以UART0為例)的內部結構和相關寄存器,給出一個有效的解決方案。 2 ARM7串口UART0內部結構 使用ARM7串口UARTO之前須設置5個寄存器,即中斷使能寄存器UOIER、UARTO格式控制寄存器UOLCR、FIFO控制寄存器 UOFCR和波特率設置寄存器UODLM和UODLL。發送過程是:CPU內核通過VPB接口對UARTO的寄存器進行讀寫訪問,數據首先進入發送緩存 UOTHR,經發送移位寄存器UOTSR逐位移出,經TxDO引腳輸出。接收過程是:數據經RxDO,先進入接收移位寄存器UORSR,經接收緩存 U0RBR,通過VPB與CPU內核相連。特別注意的是,通信過程中ARM7串口中的中斷標志寄存器U0IIR和UART0狀態寄存器UOLSR的各位將隨著通信收發而自動受到影響,也就是說這兩個寄存器記錄了數據通信過程的狀態信息,這些信息很有用。 UOIIR寄存器的描述如表1所列。
UOIIR提供狀態代碼,用于指示一個掛起中斷的中斷源和優先級。在訪問UOIIR的過程中,中斷被凍結。如果在訪問UOIIR時產生了中斷,該中斷將被記錄,在下次訪問UOIIR時可以讀出,避免了中斷的丟失。 UOLSR寄存器描述如下:
RDR:接收數據就緒。判斷該位是否置1,決定能否從FIF0中讀取數據。 0——UORBR為空。 1——UORBR中包含有效數據。從接收FIFO中讀走所有數據后,恢復為O。 0E:溢出錯誤標志。當U0RBR寄存器中已經有新的字符就緒,而接收FIF0已滿時,該位置位。 0——接收緩存區沒有溢出。 1——接收緩存區發生溢出錯誤。 PE:奇偶校驗錯誤。在使能奇偶校驗位之后,對所有接收的數據都進行奇偶校驗,如果與UOLCR中的設置不符,將引起奇偶校驗錯誤。 O——沒有發生奇偶校驗錯誤。 1——發生奇偶校驗錯誤。讀操作使該位恢復為O。 FE:幀錯誤標志。當接收字符的停止位為O時,產生幀錯誤。 O——沒有發生幀錯誤。 1——發生幀錯誤。讀取該位時恢復為O。 BI:間隔中斷標志。在發送數據時,如果RXDO引腳保持低電平,將產生間隔中斷。發生間隔中斷后,接收模塊停止數據接收。 O——沒有發生間隔中斷。 1——發生間隔中斷。 THRE:反映UOTHR是否為空,也可以認為發送FIFO是否為空。 O——不為空。 1——空。對UOTHR進行寫操作,使該位恢復為O。 TEMT:當發送移位寄存器和UOTHR均為空時,該位置位。 0——不為空。 1——空。對UOTHR進行寫操作,使該位恢復為0。 RXFE:如果一個帶有接收錯誤(如幀錯誤、奇偶錯誤或間隔中斷)的字符裝入UORBR時,該位置位。 O——UORBR中沒有接收錯誤,或UOFCR[O]為0。 1——UORBR中包含至少一個UARTO Rx錯誤。 另外,還有兩個很重要的寄存器:一個是前面提到的格式控制寄存器UOLCR,另一個是FIFO控制寄存器UOFCR。 UOLCR寄存器的描述如下:
其中第3位和第4、5位十分重要。 奇偶使能:控制是否進行奇偶校驗。如果使能,發送時將添加一位校驗位。 0——禁止奇偶產生和校驗。 1——使能奇偶產生和校驗。 奇偶選擇:設置奇偶校驗類型。 00——奇數(數據位+校驗位=奇數)。 01——偶數(數據位+校驗位=偶數)。 10——校驗位強制為1。 11——校驗位強制為O。 U0FCR寄存器的描述如下:
這里面注意第6、7位。 Rx觸發點設置:通過設置這兩位可以調整接收FIF0中觸發RDA中斷的有效字節數量。 00——觸發點O(1字節)。 01——觸發點1(4字節)。 10——觸發點2(8字節)。 11——觸發點3(14字節)。 3 9位方式多機通信編程實現 上面已說明,9位方式多機通信的關鍵是第9位的編程發送和第9位的接收和判斷。 對于發送端,利用UOLCR寄存器的設置便能實現第9位的編程發送。 UOLCR=0x2B; //帶奇偶校驗,強制為l UOLCR=Ox3B; //帶奇偶校驗,強制為O 通過以上設置,只要編程發送1字節,ARM就自動將第9位按程序設置的0或1發送出去。 難點在于接收端,即接收端把接收到的第9位放到哪了,程序員又如何知道這第9位是0還是1。 其實,ARM并不像51單片機那樣把接收到的第9位數據自動裝入SCON的RB8。實際上,ARM并沒有這樣的寄存器SCON,也沒有RB8位。要實現判斷第9位為1或0,只能利用ARM串口通信的奇偶校驗功能! 具體思路如下: ①設置奇偶校驗使能; ②編程讀取UOLSR寄存器的PE位(具體含義見UOLSR寄存器的描述部分); ③編程判斷收到的l字節中有多少個“1”,并設置一標志PP; ④將上述標志與PE位比較處理; ⑤比較的結果就正確表示了第9位是“O”,還是“1”。 按照以上思路,可有效實現第9位的判斷。下面給出相應的程序代碼:
上述程序中變量u9就是得到的第9位標志: 當u9=OxFF時,說明第9位為1; 當u9=OxFE時,說明第9位為O。 還需注意的是,接收端奇偶校驗設置成偶校驗還是奇校驗,要根據后面程序中標志pp的設置而定。 4 總結 本設計方案巧妙地應用ARM串口通信奇偶校驗功能,實現了9位方式的多機通信,并在相關課題中成功應用,而且保證了通信的可靠性。 參考文獻 1. 周立功 ARM 嵌入式系統基礎教程 2005 2. Philips公司 LPC2114/2124/2212/2214 User Manual 2004 3. 馬忠梅 單片機的C語言應用程序設計 2003 作者:空軍工程大學 胡奕明 來源:單片機與嵌入式系統應用 2009 (1) |