|
發(fā)布時(shí)間: 2012-9-10 09:21
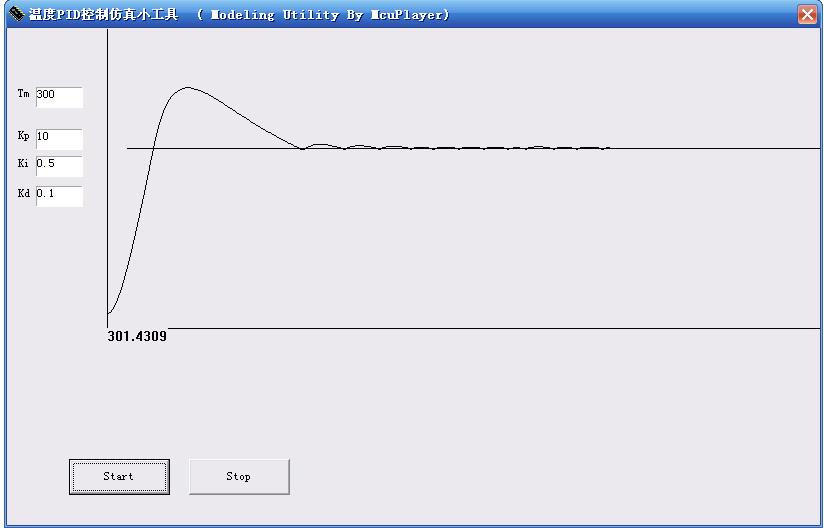
正文摘要:最近我在做一個(gè)項(xiàng)目中有PID控制,就搜了些網(wǎng)上的文章,來(lái)學(xué)習(xí)。 發(fā)現(xiàn)網(wǎng)上的文章,很多公式都是錯(cuò)誤的,有的居然連位置式和增量式都故意搞了很多區(qū)別,甚至影響控制性能。 我雖是自動(dòng)化專業(yè),但做這方面很少,于是 ... |
| 謝謝 |
| 學(xué)習(xí)了,PID真是簡(jiǎn)單也不簡(jiǎn)單 |
| 占位 |
|
PID的變種 標(biāo)準(zhǔn)PID可能無(wú)法實(shí)現(xiàn)滿意的控制,此時(shí)就要變種,比如模糊控制。 最簡(jiǎn)單的模糊控制,是分段式的,每一段使用不同的PID參數(shù)。 有人的加熱控制,在初始階段只是用比例環(huán)節(jié),以提高響應(yīng)速度,到離目標(biāo)溫度較近時(shí)再采用PID三個(gè)環(huán)節(jié)一起上,本質(zhì)上也是分段PID,就是低溫段Ki和Kd的值為0 但簡(jiǎn)單的分段式,對(duì)于變化較大的系統(tǒng),有時(shí)仍不能滿足需要,這時(shí)可以用PID動(dòng)態(tài)整定 關(guān)于PID整定的話題,我們后面討論,這里先說(shuō)下動(dòng)態(tài)整定。 在溫度控制中,對(duì)PID的參數(shù),進(jìn)行動(dòng)態(tài)調(diào)整,相當(dāng)于一個(gè)控制cycle中有幾千幾萬(wàn)次的整定。這樣可以隨時(shí)使用最佳的PID參數(shù),畢竟整個(gè)cycle整定出來(lái)的PID參數(shù)不一定適合于所有的控制階段。 |
|
P = kp * e(n); I = Ki *( e(n) + e(n-1) + e(n-2) ); D = Kd * ( e(n)-e(n-1) ); P比較簡(jiǎn)單,不再贅述 I是積分項(xiàng),對(duì)應(yīng)幾個(gè)離散誤差累計(jì),根據(jù)需要而定,誤差的累計(jì)個(gè)數(shù)本質(zhì)是積分周期的體現(xiàn) D是微分項(xiàng),一般使用最近2次的誤差之差,也有使用e(n) - e(n-2)的情況 PID = P + I + D; 輸出控制信號(hào) U(n) = U(n-1) + PID; |

 收藏
收藏 頂
頂 踩
踩