|
0 ���� �����(l��i)���S���҇�(gu��)��(j��ng)��(j��)�ĸ��ٰl(f��)չ����է���������{�T����(sh��)�Ŀ������L(zh��ng)����·��ͨ�¹ʔ�(sh��)һֱ�Ӹ߲��£���·��ͨ��r��څ��(f��)�s�͐�����Ⱥ��Ⱥ���ش��Ե�·��ͨ�¹ʕr(sh��)�аl(f��)�����o�˂���ţ����ȫ�ͼ�ͥ�Ҹ�����˘O���Ӱ푡���ˣ��ӏ�(qi��ng)܇(ch��)�v�������@���Ȟ���Ҫ������ͨ��ȫ��Ҫ�Ƀɷ����(l��i)���C��һ��܇(ch��)�v�������õ�܇(ch��)�r����һ�������{�TҎ(gu��)���IJ����������αO(ji��n)�ع���܇(ch��)�v��Ҏ(gu��)���{�T�����Ǯ�(d��ng)ǰ������Ҫ��Q�Ć�(w��n)�}�� ��܇(ch��)���ӛ䛃x���ַQ(ch��ng)����܇(ch��)��ϻ�ӡ����nj�(du��)܇(ch��)�v����ٶȡ��r(sh��)�g������Լ����P(gu��n)܇(ch��)�v����������B(t��i)��Ϣ�M(j��n)��ӛ䛡��惦(ch��)����ͨ�^(gu��)�ӿڌ�(sh��)�F(xi��n)��(sh��)��(j��)ݔ���Ĕ�(sh��)��ʽ���ӛ��b�á�Ȼ�����ӛ䛃x���܌�(sh��)�r(sh��)����O(ji��n)�����Ă���܇(ch��)�v���\(y��n)����r�������º�O(ji��n)����������A(y��)����ͨ��ȫ�¹ʷ���������������ޡ�����GPS��GSM��܇(ch��)�v�O(ji��n)��ϵ�y(t��ng)�܉�?q��)��r(sh��)�ث@��܇(ch��)�v��λ�á��ٶȵ���Ϣ����܇(ch��)�v�Č�(sh��)�r(sh��)�O(ji��n)���ṩ��һ�N��Ч;��������GPS�s�o(w��)���@���T��≺��ˮ�ء��D(zhu��n)�ٵ���Ҫ܇(ch��)�r��Ϣ����ˌ�(du��)܇(ch��)�v�ıO(ji��n)��ȱ��ȫ���ԡ� ����CAN��GSM��܇(ch��)�v�O(ji��n)�ع���ϵ�y(t��ng)���Ǟ����CAN����(xi��n)����܇(ch��)�_(k��i)�l(f��)�ġ�ԓϵ�y(t��ng)��܇(ch��)�d�O(ji��n)���O(sh��)�����ȏ�܇(ch��)�v��CAN�ӿ��ϫ@��Ԕ��(x��)��܇(ch��)�r��Ϣ��Ȼ�������҇�(gu��)Ŀǰ����졢��(y��ng)����V��GSM�Ƅ�(d��ng)ͨ��ϵ�y(t��ng)�c�O(ji��n)�������M(j��n)��ͨ�ţ���(l��i)��(sh��)�F(xi��n)��(du��)܇(ch��)�vȫ�桢��(d��ng)�B(t��i)����(sh��)�r(sh��)�ıO(ji��n)�ء�ʹ��CAN����(xi��n)�����H�ɫ@��ȫ�桢Ԕ��(x��)��܇(ch��)�r��Ϣ������ʹϵ�y(t��ng)���к�(qi��ng)�ĔU(ku��)չ�ԣ����磬���Ԍ�GPSģ�K����CAN��һ��(g��)���ܹ�(ji��)�c(di��n)����ڿ���(xi��n)�ϣ��@��ϵ�y(t��ng)�;߂��˱O(ji��n)��܇(ch��)�vλ�õ������� 1 CAN����(xi��n)���g(sh��) ���ˌ�(sh��)�F(xi��n)�F(xi��n)����܇(ch��)���������ӿ����b��֮�g��ͨ�ţ��p�ٲ������ӵ���̖(h��o)��(xi��n)���������Ϣ��ݔ�����ϱ�횲��ÿ���(xi��n)�ķ�ʽ�M(j��n)�Ђ�ݔ�� CAN(Controller Area Network)����(xi��n)���ǬF(xi��n)�����е�һ�N�^�����M(j��n)�ġ����ܳ�ɫ�ĬF(xi��n)��(ch��ng)����(xi��n)���g(sh��)������80�������(gu��)Bosch��˾���Q�F(xi��n)����܇(ch��)�б���Ŀ����c�y(c��)ԇ�x��֮�g�Ĕ�(sh��)��(j��)���Q���_(k��i)�l(f��)��һ�N���Д�(sh��)��(j��)ͨ�Ņf(xi��)�h����һ�N��������(xi��n)��ͨ�Žӿڼ�����CAN�f(xi��)�h����Ӻ͔�(sh��)��(j��)�·�ӹ��ܣ��Ɍ�(du��)ͨ�Ŕ�(sh��)��(j��)�M(j��n)�Ў�̎����CANͨ�^(gu��)��(du��)ͨ�Ŕ�(sh��)�ƉK�M(j��n)�о��a�����C�˾W(w��ng)�j(lu��)��(n��i)��(ji��)�c(di��n)��(g��)��(sh��)�Ą�(d��ng)�B(t��i)�ԣ���ʹ��ͬ�Ĺ�(ji��)�c(di��n)ͬ�r(sh��)���յ���ͬ�Ĕ�(sh��)��(j��)����(sh��)�ζ��L(zh��ng)�������8��(g��)�ֹ�(ji��)�����C��ͨ�ŵČ�(sh��)�r(sh��)�ԣ����f(xi��)�h���� CRC�z�(y��n)�ṩ����(y��ng)���e(cu��)�`̎�����ܣ��܉��C��(sh��)��(j��)ͨ�ŵĿɿ��ԡ�����CAN���g(sh��)Ҏ(gu��)���H��������Ӻ͔�(sh��)��(j��)�·���f(shu��)������δ��(du��)��(y��ng)�ÌӵĹ��ܺ͌�(sh��)�F(xi��n)�M(j��n)�ж��x����ˣ��Ñ�(h��)�ȿ��Բ��Ç�(gu��)�HCAN����(xi��n)�Ñ�(h��)�������̅f(xi��)��(hu��)������һЩ�M���ƶ����_(k��i)��ʽ�ߌӅf(xi��)�h��Ҳ����ס�������`��،�(sh��)�F(xi��n)�Լ��đ�(y��ng)�Ìӡ���ʮ����đ�(y��ng)���^(gu��)���У�CAN����O�ߵĿɿ��ԡ���(sh��)�r(sh��)�Ժ��`���ԣ��ڹ��I(y��)�^(gu��)�̱O(ji��n)���O(sh��)��Ļ��B����@���ˏV���đ�(y��ng)�ã��õ���Ӣ�ؠ���Ħ���_���������֡����T(m��n)�ӵȰ���҇�(gu��)�H������˾��֧�֣������J(r��n)��������ǰ;�ĬF(xi��n)��(ch��ng)����(xi��n)֮һ����ϵ�y(t��ng)����CAN����(xi��n)���������ԣ��p����܇(ch��)��(n��i)�ľ�(xi��n)������Q�˱��(ji��)�c(di��n)֮�g��ͨ�ņ�(w��n)�}�� 2 ܇(ch��)�v�O(ji��n)�ع���ϵ�y(t��ng)�O(sh��)Ӌ(j��) 2��1 ϵ�y(t��ng)�O(sh��)Ӌ(j��) ��܇(ch��)�v���ܱO(ji��n)��ϵ�y(t��ng)������CAN����(xi��n)���g(sh��)�ɼ�܇(ch��)�v�ĸ��N��Ϣ������܇(ch��)�vÿ�ε�����(d��ng)�r(sh��)�g�������̡����r(sh��)�g�����܇(ch��)���Լ�ÿ�����܇(ch��)�ٵij��m(x��)�r(sh��)�g����(ch��)��ͣ܇(ch��)ǰ20���܇(ch��)�v��Ϣ��Ȼ�����ìF(xi��n)���GSM�W(w��ng)�j(lu��)������Ϣ�Զ���Ϣ����ʽ���ͽo�O(ji��n)�����ģ��Ԍ�(sh��)�F(xi��n)��(du��)܇(ch��)�v�Č�(sh��)�r(sh��)�O(ji��n)�ء� 
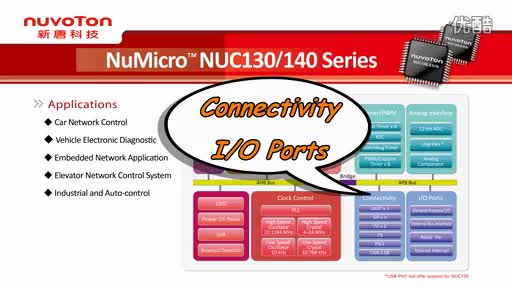
2��2 Ӳ���O(sh��)Ӌ(j��) ܇(ch��)�d�O(ji��n)���O(sh��)�������оƬ�����w˼����(Freescale)��˾����܇(ch��)�����(y��ng)�ö��_(k��i)�l(f��)��16λ��Ƭ�C(j��)MC9S12HZ��ԓ��Ƭ�C(j��)�c܇(ch��)�d�O(ji��n)���O(sh��)�����P(gu��n)����Ҫ�YԴ�У�32��256K��Flash��2��12K��RAM��1��2K��EEPROM��2��(g��)�ɼ���CAN2��0A��B���ʿ��_(d��)lMb��s��CAN��������2 ��(g��)ȫ�p����������ͨ�Žӿڣ�32��4��LCD�(q��)��(d��ng)���� ��MC9S12HZ��(g��u)�ɵ�܇(ch��)�d�O(ji��n)���O(sh��)��Ӳ���B��ʾ��D��D2��ʾ���cCAN����(xi��n)�Ľӿڷ��棬�҂�����������(NXP)��˾�ĸ���CAN�հl(f��)�� TJAl050����������EMC��ESD���ܣ����·��߀�����˹�ģ����ȦL40��ESD���o(h��)���O��D39��
GSMģ�K�����˃��T(m��n)�ӵ�TC35i��ԓģ�Kͨ�^(gu��)40�_��ZIF(Zero Insertion Force)�ӿ��c�ⲿ�����������B�ӡ��O(ji��n)��ϵ�y(t��ng)�Hʹ����GSM�W(w��ng)�j(lu��)��SMS�I(y��)��(w��)���������оƬ�cTC35i�H��Ҫ���е�TXD��RXD�ɂ�(g��)���_�͉��ˣ���������MC9S12HZͨ�^(gu��)AT���(sh��)�F(xi��n)�PTC35i�Ŀ��ơ� ��Ƭ�C(j��)�cTC35i֮��(w��n)ͨ�^(gu��)�����M(j��n)��ͨӍ��TC35i֧�ֵ��Ԅ�(d��ng)�����ʷ�����1200��230400B��s���҂��x��9600B��s�IJ����ʡ��� TC35i�փ�(c��)��֪���䴮�нӿ���ҪCMOS�ƽ����MC9S12HZ��TTL�ƽ�������Ҫ�ƽ�D(zhu��n)�Q�·����D2��ʾ���O(ji��n)��������PC�C(j��)�cTC35iģ�K�M�ɣ�����֮�g���ƽ�D(zhu��n)�Q���ƽ�D(zhu��n)�QоƬMAX232��ɡ� 2��3 ܛ���O(sh��)Ӌ(j��) ��CAN����(xi��n)�ς�ݔ?sh��)��?ch��)�v�\(y��n)�Ѕ���(sh��)�dz��࣬��(sh��)��(j��)���ܴ�GSM�W(w��ng)�j(lu��)��SMS�I(y��)��(w��)��ݔ�ٶ����ޣ���˲����܌�CAN����(xi��n)�ϵ�������Ϣ�����رO(ji��n)�����ġ���(sh��)�H��Ҳ�](m��i)�б�Ҫ�O(ji��n)�����е�܇(ch��)�v�\(y��n)�Ѕ���(sh��)��ֻҪ�O(ji��n)���҂����P(gu��n)�ĵġ��c��܇(ch��)��ȫ�P(gu��n)ϵ��o�ܵ�һЩ����(sh��)������ˡ� ��(du��)�ڲ�ͬ�ą���(sh��)���O(ji��n)�ص���ʽ�Dz�ͬ�ģ���Щ��Ϣ��Ҫ���r(sh��)���M(j��n)�бO(ji��n)�أ�����܇(ch��)�vλ����Ϣ������Щ��Ϣֻ���ڳ������������r(sh��)����Ҫ�l(f��)�ͣ���܇(ch��)�ٻ��D(zhu��n)����Ϣ�ȡ����⣬��(du��)�ڲ�ͬ܇(ch��)�ͣ���Ҫ�O(ji��n)�صą���(sh��)Ҳ���Ѕ^(q��)�e�ģ����ߌ�(du��)��ͬһ��(g��)����(sh��)���ڲ�ͬ����r�£���O(ji��n)����ʽ�ͱO(ji��n)�ط���Ҳ��(hu��)�l(f��)��׃�������Ҫ��܇(ch��)�d�O(ji��n)���O(sh��)����Ԅ�(d��ng)�B(t��i)�ظ�׃�O(ji��n)����(sh��)�ͱO(ji��n)����ʽ�� ���ˌ�(sh��)�F(xi��n)��(du��)܇(ch��)�v�Ą�(d��ng)�B(t��i)�O(ji��n)�أ���܇(ch��)�d�O(ji��n)���O(sh��)��Ŀ������н�����һ��(g��)�O(ji��n)���б����б��е�ÿһ�(xi��ng)��������(sh��)Ⱥ��̖(h��o)PGN���O(ji��n)������ԓP(y��ng)GN�е�λ�á��O(ji��n)�ص���ʽ���O(ji��n)�ؕr(sh��)�g�g���ͱO(ji��n)����(sh��)�����ȡ��@��(g��)����(sh��)�б����(xi��ng)Ŀ���Ը���(j��)�O(ji��n)�����İl(f��)��(l��i)�������M(j��n)�Є�(d��ng)�B(t��i)�����ӻ�h�����Ķ���(sh��)�F(xi��n)��(du��)܇(ch��)�v�Ą�(d��ng)�B(t��i)�O(ji��n)�ء� ܇(ch��)�d�O(ji��n)���O(sh��)���ܛ��������������D3��ʾ������ͨ�ŵ��հl(f��)����CAN����(xi��n)�ıO(ji��n) (t��ng)��������Д��������ɣ���(d��ng)���յ�����(y��ng)�����(sh��)��(j��)����(sh��)��(j��)���뾏�_�^(q��)���O(sh��)������(y��ng)�Ę�(bi��o)־λ��������ͨ�^(gu��)��ԃ(x��n)�@Щ��(bi��o)־λ��(l��i)��(zh��)������(y��ng)�Ą�(d��ng)���������������xȡ�惦(ch��)��Ƭ��(n��i)EEPROM�е�Ĭ�J(r��n)�R���б���������(j��)�O(ji��n)���б��е�PGN���O(sh��)�� MC9S12HZ��CAN ID��(b��o)�Ę�(bi��o)�R(sh��)���V������ģ�Ĵ���������ɸ���(j��)�����(d��ng)����ıO(ji��n)����(sh��)�б���������(j��)����Q���Ƿ����EEPROM�е�Ĭ�J(r��n)�R���б�����(d��ng)Ҫ�O(ji��n)�ص�PGN����(sh��)��(j��)�r(sh��)��Ҫ�Д�ԓ��(sh��)��(j��)�Ƿ���ϰl(f��)�͗l�����@Щ�l���������r(sh��)�g�������O(ji��n)��׃��ֵ�Ƿ����������ȣ�������ϰl(f��)�͗l�����t��ԓP(y��ng)GN���䌦(du��)��(y��ng)�Ĕ�(sh��)��(j��)���ӵ��l(f��)���б��С�
3 �Y(ji��)���Z(y��) ��ϵ�y(t��ng)����CAN����(xi��n)���g(sh��)��(l��i)�@��܇(ch��)�v�ĸ��NԔ��(x��)��Ϣ�����ґ�(y��ng)��GSM�W(w��ng)�j(lu��)�c�O(ji��n)��ϵ�y(t��ng)�M(j��n)��ͨ�ţ����H��(sh��)�F(xi��n)�ˌ�(du��)܇(ch��)�v�O(ji��n)����(sh��)�Ą�(d��ng)�B(t��i)�O(sh��)�ã�߀����CAN����(xi��n)���g(sh��)�IJ��ã�ʹ��ͨ�^(gu��)����CAN�����ܹ�(ji��)�c(di��n)��(l��i)�U(ku��)չ�O(ji��n)�،�(du��)��׃�ú����ס��@�ʹ������˱O(ji��n)��ϵ�y(t��ng)���`���Ժ�ȫ���ԡ�ͬ�r(sh��)����GSM����Ϣ�I(y��)��(w��)�M(j��n)�Д�(sh��)��(j��)���ͣ��B�Ӻ�(ji��n)�Σ��M(f��i)�õ��������w�����V�� �����īI(xi��n) 1. ��?ji��n)��?ꐺ�܊,���A,����CAN,����(xi��n)�Ķ����܇(ch��)���ӛ䛃x[J].��Ӽ��g(sh��)��(y��ng)��2002,(12):38-40. 2. �팎��,�R��,�R����,����GSM����Ϣ��GPS܇(ch��)�v�O(ji��n)���Ƅ�(d��ng)��Ԫ�O(sh��)Ӌ(j��)[J].��ӹ��̎�2002,28(2):30-31. 3. ���h��,����.����GSM/GPRS�h(yu��n)��ͨӍ��GPS܇(ch��)�v�C�ϱO(ji��n)���{(di��o)�ȹ���ϵ�y(t��ng)[J].Ӌ(j��)��C(j��)�y(c��)���c����,2003,11(1):846-849. 4. ����Ⱥ,��܇(ch��)���ӛ䛃x�ڵ�·��ͨ�����еđ�(y��ng)��[J],�V�|�����Ƽ�,2003,(4):59-61. 5. ��־��,�侯܇(ch��)�v����[M]//����:�侯���̌W(xu��)ԺӖ(x��n)����,2002:1-24 ���ߣ����p(�侯���̌W(xu��)Ժ�о����������(du��)) ��S��(�侯���̌W(xu��)Ժ���g(sh��)���A(ch��)������) ��(l��i)Դ����ӿƼ� 2009 36(11) |