|
���ߣ�Microchip��(j��)�I(y��ng)�N���̎�-II Nelson Alexander ���ڲ��ßo�������ň�(ch��ng)������ƣ�FOC��������ͬ��늙C(j��)��PMSM���ĸ�(j��)늙C(j��)����ϵ�y(t��ng)�����ռ����@�N�F(xi��n)��ı����Ѓɂ�(g��)��Ҫ�(q��)��(d��ng)���أ������Ч�ͼӏ�(qi��ng)�a(ch��n)Ʒ�IJ�����mȻ���C��(j��)�������ßo������FOC��PMSM���Ԍ�(sh��)�F(xi��n)�@�ɂ�(g��)Ŀ��(bi��o)������Ҫһ��(g��)���ṩ���w��(sh��)�F(xi��n)�������O(sh��)Ӌ(j��)���B(t��i)ϵ�y(t��ng)����ȡ�óɹ����������w�����B(t��i)ϵ�y(t��ng)���O(sh��)Ӌ(j��)�ˆT�܉�˷���(sh��)�F(xi��n)�^������Kϵ�y(t��ng)���õĸ��N����(zh��n)�� ��ʲô�x��PMSM�� PMSM늙C(j��)��һ�Nʹ������Q��ğoˢ늙C(j��)������(j��ng)���c�oˢֱ��늙C(j��)��BLDC�������������ǟoˢ늙C(j��)ϵ�е���һ��(g��)�ɆT��Ҳʹ����ӓQ���ڽY(ji��)��(g��u)�����в�ͬ��PMSM�ĽY(ji��)��(g��u)��ᘌ�(du��)FOC�M(j��n)�Ѓ�(y��u)������BLDC늙C(j��)��(j��ng)�^��(y��u)�����ʹ��6���Q���g(sh��)����(j��ng)�^��(y��u)����PMSM�ɫ@�����Ҳ���늄�(d��ng)��(sh��)��Back-EMF������BLDC늙C(j��)�t�@�����β���늄�(d��ng)��(sh��)�� �@Щ늙C(j��)����ʹ�õ��D(zhu��n)��λ�Â�����Ҳ��ͬ��PMSMͨ��ʹ��һ��(g��)λ�����a���M(j��n)�в�������BLDC늙C(j��)�tʹ������(g��)�����������M(j��n)�в�����������]���ɱ����O(sh��)Ӌ(j��)�ˆT���Կ��]��(sh��)ʩ�o���������g(sh��)����ʡȥ���w�����������B�����ͽӾ��ijɱ���ȥ��������߀��������߿ɿ��ԣ���?y��n)��@��(hu��)�p��ϵ�y(t��ng)�п��ܰl(f��)�����ϵ�Ԫ����(sh��)������(d��ng)���^�o������PMSM�͟o������BLDC�r(sh��)��ʹ��FOC�㷨�ğo������PMSM���ṩ����ɫ�����ܣ���ʹ�����Ӳ���O(sh��)Ӌ(j��)�Č�(sh��)�F(xi��n)�ɱ��ஔ(d��ng)�� �D(zhu��n)��PMSM���������������ЩĿǰ����ʹ����ˢֱ����BDC�������Б�(y��ng)늙C(j��)��ACIM���đ�(y��ng)�á��ГQ����Ҫ��̎�������и��͵Ĺ��ġ����ߵ��ٶȡ���ƽ��(w��n)���D(zhu��n)�ء����͵Ŀ����������L(zh��ng)��ʹ�É�����С�ɵijߴ磬�Ķ�ʹ��(y��ng)�ø��߸�(j��ng)��(zh��ng)�������ǣ�Ҫ�댍(sh��)�F(xi��n)ʹ��PMSM���@Щ��̎���_�l(f��)�ˆT��Ҫ��(sh��)�F(xi��n)����(f��)�s��FOC���Ƽ��g(sh��)�Լ�������(y��ng)���ض��㷨�����ܝM��ϵ�y(t��ng)�����mȻPMSM��BDC��ACIM�ijɱ����Ӱ��F���������и�����(y��u)��(sh��)�� ��(sh��)�F(xi��n)�е�����(zh��n) 
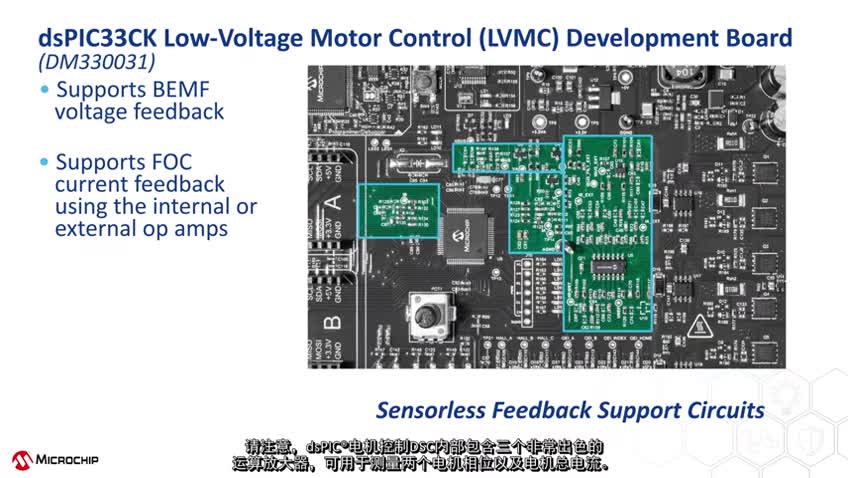
�D1��ʹ������늉�Դ��׃���������o������PMSM����ϵ�y(t��ng) ���ǣ�Ҫ��(sh��)�F(xi��n)ʹ��PMSM�ă�(y��u)��(sh��)����Ҫ�˽⌍(sh��)�F(xi��n)��(j��)FOC늙C(j��)���Ƽ��g(sh��)�r(sh��)���е�Ӳ����(f��)�s�ԣ�ͬ�r(sh��)߀��Ҫ�����@һ�I(l��ng)��Č��I(y��)֪�R(sh��)���D1�o����ʹ������늉�Դ��׃���������o������PMSM����ϵ�y(t��ng)��������׃����Ҫ����(du��)��P(gu��n)(li��n)�ĸ߷ֱ���PWM��̖(h��o)���Լ�������Ҫ��̖(h��o)�{(di��o)����ģ�M������̖(h��o)����ϵ�y(t��ng)߀��ҪӲ�����o(h��)���܁팍(sh��)�F(xi��n)���e(cu��)��ͬ�r(sh��)���ø���ģ�M���^����(sh��)�F(xi��n)�˿���푑�(y��ng)����(sh��)�F(xi��n)���С����ƺͱ��o(h��)������@Щ�~��ģ�MԪ�������˽�Q�����ijɱ��������͵�BDC늙C(j��)�O(sh��)Ӌ(j��)��(ji��n)�ε�ACIMÿ��Ɲ늉���V/F�����Ʋ�����Ҫ�@ЩԪ���� ���⣬߀�О�PMSM늙C(j��)���Ƒ�(y��ng)�ö��xԪ��Ҏ(gu��)����M(j��n)���(y��n)�C������_�l(f��)�r(sh��)�g�� Ҫ��(y��ng)��(du��)�@Щ����(zh��n)���O(sh��)Ӌ(j��)�ˆT�����x��һ����m����Ƭ�C(j��)���Ԍ�(sh��)�F(xi��n)�c����PMSM늙C(j��)�����������Ƶ�����Ҏ(gu��)��ĸ߶�ģ�M���ɡ��@����(hu��)�p��������ⲿԪ����(sh��)������(y��u)��������Σ�BOM�����߶ȼ��ɵ�늙C(j��)���������F(xi��n)�Ѿ��и߷ֱ���PWM���ɺ�(ji��n)����(j��)�����㷨�����ھ��ܜy(c��)������̖(h��o)�{(di��o)���ĸ���ģ�M���O(sh��)�����ܰ�ȫ�����Ӳ�����O(sh��)���Լ�����ͨ�ź��{(di��o)ԇ�Ĵ��нӿڵČ�(sh��)�F(xi��n)��
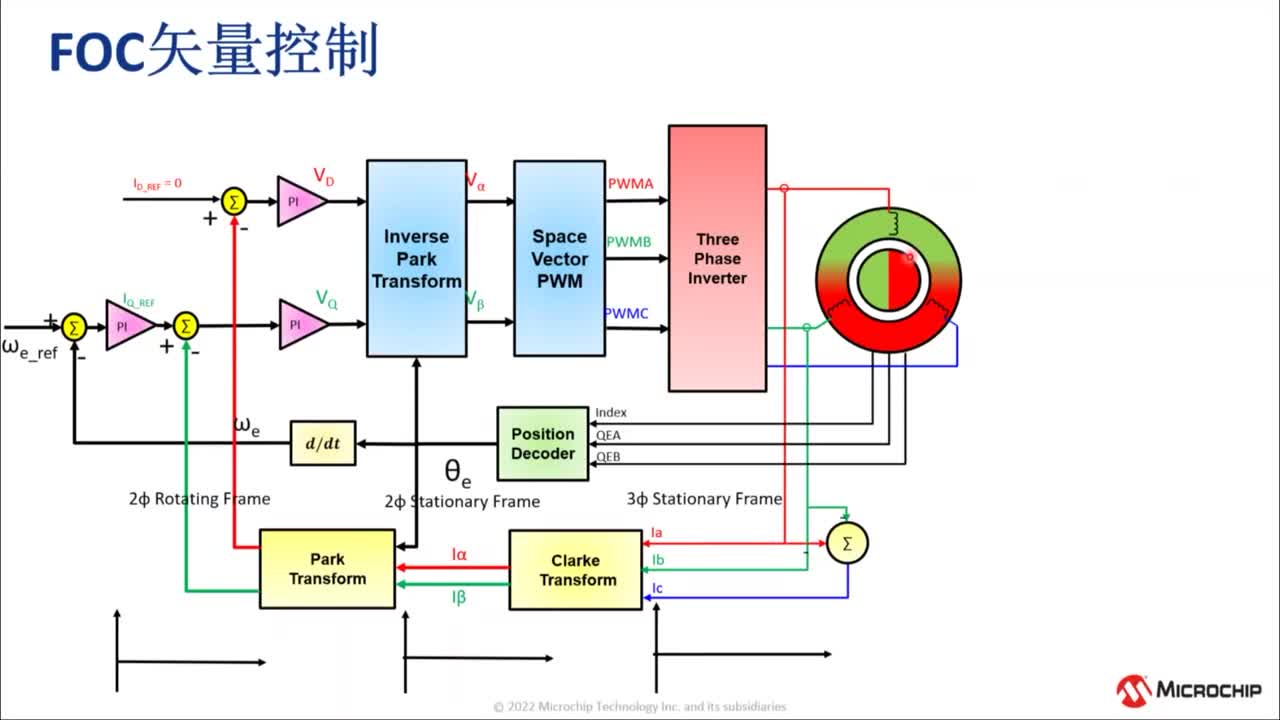
�D2����(bi��o)��(zh��n)�o������FOC�Ŀ�D ���⣬߀��һ��(g��)�^�������(zh��n)����늙C(j��)����ܛ���c늙C(j��)��늙C(j��)е�О�֮�g�Ľ������D2�o���˘�(bi��o)��(zh��n)�ğo������FOC��D��Ҫ����ĸ����D(zhu��n)׃?y��u)�?sh��)�H���O(sh��)Ӌ(j��)����Ҫ�˽�������ܘ�(g��u)�͔�(sh��)����̖(h��o)̎������DSP��ָ��Ԍ�(sh��)�F(xi��n)��(sh��)�W(xu��)Ӌ(j��)���ܼ��ĕr(sh��)�g�P(gu��n)�I���ƭh(hu��n)�� �錍(sh��)�F(xi��n)�ɿ������ܣ����ƭh(hu��n)�����һ��(g��)PWM���ڃ�(n��i)��(zh��)�С���회�(du��)���ƭh(hu��n)�ĕr(sh��)�g�M(j��n)�Ѓ�(y��u)�������w������������(g��)ԭ�� 1) ���ƣ�ʹ�ò�����20 kHz��PWM�_�P(gu��n)�l�ʣ��r(sh��)�L(zh��ng)��50 ��s���������Ɓ�����׃���_�P(gu��n)������ 2) �錍(sh��)�F(xi��n)�������ߵĿ���ϵ�y(t��ng)�����ƭh(hu��n)�����һ��(g��)PWM���ڃ�(n��i)��(zh��)�С� 3) ��֧���������_(t��i)�΄�(w��)����ϵ�y(t��ng)�O(ji��n)ҕ����(y��ng)���ض����ܺ�ͨ�ţ������ƭh(hu��n)��Ҫ�Ը�����ٶ��\(y��n)�С���ˣ�F(xi��n)OC�㷨��Ŀ��(bi��o)��(y��ng)ԓ����10 ��s�ԃ�(n��i)��(zh��)�С� �S���������ṩ�����ßo�������������������D(zhu��n)��λ�õ�FOCܛ��ʾ�������ǣ���ʹ늙C(j��)�_ʼ�D(zhu��n)��(d��ng)֮ǰ��F(xi��n)OC�㷨������ø��N����(sh��)��ƥ��늙C(j��)��Ӳ������회�(du��)���ƅ���(sh��)��ϵ��(sh��)�M(j��n)���M(j��n)һ����(y��u)�����ԝM��������ٶȺ�Ч��Ŀ��(bi��o)������ͨ�^�Y(ji��)�����·�����(sh��)�F(xi��n)�@һĿ��(bi��o)��1) ʹ��늙C(j��)��(sh��)��(j��)�փ�(c��)�@�Å���(sh��)��2) ����(f��)�M(j��n)��ԇ�(y��n)��늙C(j��)��(sh��)��(j��)�փ�(c��)������ʼ�K��(du��)늙C(j��)����(sh��)�M(j��n)�М�(zh��n)�_�ı����������O(sh��)Ӌ(j��)�ˆT�o���@�ø߾��Ȝy(c��)���O(sh��)�䣬���@�N��r�£��_�l(f��)�ˆT�����ò���������(f��)ԇ�(y��n)�ķ������@�N�ք�(d��ng)�{(di��o)�����^����Ҫ�r(sh��)�g�ͽ�(j��ng)�(y��n)�� PMSM늙C(j��)�����S�ͬ�đ�(y��ng)�ã��\(y��n)���ڲ�ͬ�ĭh(hu��n)���У����ߴ��ڲ�ͬ���O(sh��)Ӌ(j��)���ơ����磬����܇ɢ�����L(f��ng)���У���(d��ng)늙C(j��)��������(d��ng)�r(sh��)�������L(f��ng)�����ã��L(f��ng)���~Ƭ�п������෴�ķ����������D(zhu��n)�����@�N��r�£�����(d��ng)���ßo�������㷨��PMSM늙C(j��)��һ��(g��)����(zh��n)�������п��ܓp����׃����һ�N��Q�����Ǚz�y(c��)���D(zhu��n)������D(zhu��n)��λ�ã��������@Щ��Ϣ�چ���(d��ng)늙C(j��)ǰͨ�^����(d��ng)�Ƅ�(d��ng)��늙C(j��)�p�����oֹ?f��n)�B(t��i)��ͬ�ӣ�߀�����б�Ҫ��(sh��)ʩ�����㷨����ÿ��������D(zhu��n)�أ�MTPA�����D(zhu��n)���a(b��)���ʹň�(ch��ng)����[1]�ȡ��@Щ��͵đ�(y��ng)���ض������㷨��(du��)���_�l(f��)��(sh��)�ý�Q�����ز����٣�������Ҳ��(hu��)���L(zh��ng)�_�l(f��)�r(sh��)�g��ʹܛ���(y��n)�C��(f��)�s�����M(j��n)�������O(sh��)Ӌ(j��)��(f��)�s�̶ȡ�
�D3��FOC�đ�(y��ng)�ÿ�� ���͏�(f��)�s�̶ȵ�һ�N��Q�����ǣ��O(sh��)Ӌ(j��)�ˆT��(chu��ng)��һ��(g��)ģ�K��ܛ���ܘ�(g��u)���@�N�ܘ�(g��u)�Ɍ���(y��ng)���ض��㷨���ӵ�FOC�㷨�У�ͬ�r(sh��)��Ӱ푕r(sh��)�g�P(gu��n)�I�͈�(zh��)�С��D3�o���˵��͵Č�(sh��)�r(sh��)늙C(j��)���Ƒ�(y��ng)�ó����ܛ���ܘ�(g��u)���˿�ܵĺ�����FOC����(sh��)��ԓ����(sh��)�ṩ��Ӳ�r(sh��)��s�����S����(y��ng)���ض��ĸ��ӹ��ܡ���܃�(n��i)�Ġ�B(t��i)�C(j��)���@Щ���ƹ����c����(y��ng)�ó����B���������@�N�ܘ�(g��u)��Ҫ��ܛ������(sh��)�K֮�g��һ��(g��)���x���_�Ľӿڣ���ʹ�䌍(sh��)�F(xi��n)ģ�K������(ji��n)�����a�S�o(h��)������ģ�K�����֧�ֲ�ͬ��(y��ng)���ض��㷨�c����ϵ�y(t��ng)�O(ji��n)ҕ�����o(h��)���ܰ�ȫ����ļ��ɡ� ģ�K���ܘ�(g��u)����һ��(g��)��̎�nj����O(sh��)�ӿڌӣ���Ӳ������ӣ���늙C(j��)����ܛ���з��x�������@�����O(sh��)Ӌ(j��)�ˆT�ڑ�(y��ng)�ù��ܺ���������l(f��)��׃���r(sh��)������IP��һ��(g��)늙C(j��)�������o�p�w�Ƶ���һ��(g��)늙C(j��)�������� �������B(t��i)ϵ�y(t��ng)������ ��(y��ng)��(du��)�@Щ����(zh��n)��Ҫһ��(g��)��o������FOC���������늙C(j��)�������B(t��i)ϵ�y(t��ng)��늙C(j��)��������Ӳ����ܛ�����_�l(f��)�h(hu��n)����(y��ng)�f(xi��)ͬ�������Ժ�(ji��n)����(sh��)�F(xi��n)��(j��)늙C(j��)�����㷨���^�̡� �錍(sh��)�F(xi��n)�@һĿ��(bi��o)�������B(t��i)ϵ�y(t��ng)��(y��ng)�����������ԣ� 1. һ�N�����Ԅ�(d��ng)��(zh��)��늙C(j��)����(sh��)�y(c��)�����O(sh��)Ӌ(j��)���ƭh(hu��n)������Դ���a�ĸ�(j��)���ߣ����]���I(l��ng)��?q��)��I(y��)֪�R(sh��)���O(sh��)Ӌ(j��)�ˆT�܉�?q��)��F(xi��n)FOC늙C(j��)���ƣ����������{(di��o)ԇ�dz��ĕr(sh��)�ď�(f��)�s�r(sh��)�g�P(gu��n)�I�ʹ��a 2. �m����FOC�Ͳ�ͬ��(y��ng)���ض������㷨�đ�(y��ng)�ÿ�ܣ����ڿs���_�l(f��)�͜y(c��)ԇ�r(sh��)�g 3. ���д_����푑�(y��ng)��늙C(j��)�������Լ����چ�оƬ�Ќ�(sh��)�F(xi��n)��̖(h��o)�{(di��o)����ϵ�y(t��ng)���o(h��)�ļ���ģ�M���O(sh��)�����ڽ��ͽ�Q�������ɱ�
�D4��Microchip늙C(j��)�������B(t��i)ϵ�y(t��ng)�ܘ�(g��u) �D4�o����һ��(g��)늙C(j��)�������B(t��i)ϵ�y(t��ng)�ܘ�(g��u)��ʾ�������а�����(y��ng)�ÿ�ܺ�һ��(g��)���ڸ�����dsPIC33늙C(j��)���Ɣ�(sh��)����̖(h��o)��������DSC�����_�l(f��)�������_�l(f��)���ڻ���GUI��FOCܛ���_�l(f��)���ߵĻ��A(ch��)�Ϙ�(g��u)�������Ԝy(c��)���P(gu��n)�I��늙C(j��)����(sh��)���Ԅ�(d��ng)�{(di��o)�������������档���⣬��߀�ɞ�����늙C(j��)���Ƒ�(y��ng)�ÿ�ܣ�MCAF�����_�l(f��)�h(hu��n)���Є�(chu��ng)�����(xi��ng)Ŀ���������Դ���a����Q�����f(xi��)�h���ĺ�����늙C(j��)���Ǝ�(k��)���@�N��(k��)���Ԍ�(sh��)�F(xi��n)��(y��ng)�ó���ĕr(sh��)�g�P(gu��n)�I�Ϳ��ƭh(hu��n)���ܣ����cdsPIC33 DSC��늙C(j��)�������O(sh��)��������GUI���c����(g��)���õ�늙C(j��)�����_�l(f��)�����ʹ�ã�֧��늙C(j��)����(sh��)��ȡ������N�͉��߉�늙C(j��)����FOC���a�� ��(du��)����Ч�ͮa(ch��n)Ʒ����������Ƅ�(d��ng)����oˢ늙C(j��)���D(zhu��n)׃��ȫ���늙C(j��)�������B(t��i)ϵ�y(t��ng)���ṩһ�N���w��������(ji��n)������PMSM�ğo������FOC�Č�(sh��)�F(xi��n)���@�N������(y��ng)�������õ�늙C(j��)������������ԭ���_�l(f��)��Ϳ��Ԅ�(d��ng)���ɴ��a������FOC�_�l(f��)ܛ���� �����Y�� [1] TB3220-���ýǶȸ�ۙ�i��h(hu��n)��������(sh��)�F(xi��n)����������������ͬ��늙C(j��)�������N�b�̓�(n��i)�ã��ğo�������ň�(ch��ng)������� http://www.microchip.com.cn/newc ... 3/5e65d169337d8.pdf [2] motorBench®�_�l(f��)�� https://www.microchip.com/design ... lopment-auto-tuning [3] 늙C(j��)�����O(sh��)Ӌ(j��)�YԴ https://www.microchip.com/design-centers/motor-control-and-drive [4] 늙C(j��)���Ǝ�(k��) https://www.microchip.com/design ... tor-control-library |