|
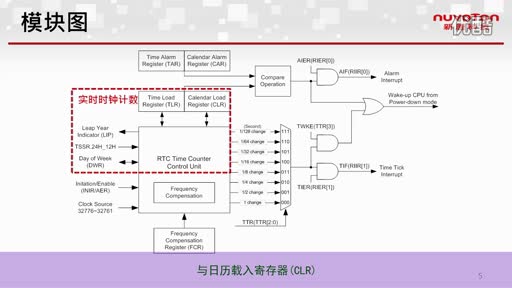
RTC(Real Time Clock)��Ԫ����ϵ�y(t��ng)��늕r(sh��)ͨ�^ϵ�y(t��ng)����늳ع�늣�RTC��ͨ�^ARM��STRB/LDRBָ���ݔ8λBCD��(sh��)��(j��)��CPU��ԓ��(sh��)��(j��)�����r(sh��)���֣��룬С�r(sh��)���죬�º��꣬RTCʹ��һ��(g��)�ⲿ32.768KHZ�ľ��wҲ�܈�(zh��)�Ј�(b��o)�����ܡ� ��(b��o)�����ܡ��ڵ��ģʽ����������ģʽ�£�RTC�܉���ָ���ĕr(sh��)�g�a(ch��n)����(b��o)����̖(h��o)������������ģʽ�£���(b��o)���ДࣨALMINT��������ڵ��ģʽ�£��Դ�����K����̖(h��o)PMWKUPҲ�cALMINTһ��̎�ڼ����B(t��i)��RTC�Ĉ�(b��o)���Ĵ�����RTCALM�����ԛQ����(b��o)����ʹ�ܻ��ֹ�͈�(b��o)���r(sh��)�g���O(sh��)�×l���� ��(ji��)���ДࡣRTC��(ji��)�ĕr(sh��)�g�����Д�Ո(q��ng)��TICNT�Ĵ�������һ��(g��)�Д�ʹ��λ��ͬ�r(sh��)���е�Ӌ(j��)��(sh��)ֵ�����Дࡣ��(d��ng)Ӌ(j��)��(sh��)ֵ���_(d��)0�r(sh��)����(ji��)�ĕr(sh��)�g�Д�͕�(hu��)�|�l(f��)���Д�ĕr(sh��)�g�g��Ӌ(j��)�����£� �Д���g���r(sh��)�g = (n+1)/128 ��λ���� ����n��ֵ��1"127 ����ij���?q��)��F(xi��n)�ˣ���һ��(g��)�I�����Ը��®�(d��ng)ǰ�r(sh��)�g������ͨ�^���ڰl(f��)�͔�(sh��)��(j��)�Į�(d��ng)ǰ�r(sh��)�g���O(sh��)����(b��o)���Ĵ�������(b��o)�����|�l(f��)��(hu��)�|�l(f��)�r(sh��)�g��(ji��)���Д࣬�Д��r(sh��)�g�g��λ1s�����m(x��)�r(sh��)�g��20s��Ҳ�����g��1s���Q���һ�¡�����һ��(g��)�I��ֹͣ��(ji��)�ĕr(sh��)�g�Дֹ࣬ͣ���Q���� #include "Font_Libs.h" #include "2440addr.h" #define _ISR_STARTADDRESS 0x33ffff00 #define pISR_EINT0 (*(unsigned *)(_ISR_STARTADDRESS+0x20)) #define pISR_TICK (*(unsigned *)(_ISR_STARTADDRESS+0x40)) #define pISR_RTC (*(unsigned *)(_ISR_STARTADDRESS+0x98)) #define pISR_EINT2 (*(unsigned *)(_ISR_STARTADDRESS+0x28)) #define pISR_UART0 (*(unsigned *)(_ISR_STARTADDRESS+0x90)) //��ֱͬ����̖(h��o)���}��������ǰ�� #define VSPW 15 #define VBPD 3 #define VFPD 5 //ˮƽͬ����̖(h��o)���}��������ǰ�� #define HSPW 8 #define HBPD 58 #define HFPD 15 #define CLKVAL 10 #define HOZVAL 319 #define LINEVAL 239 #define PWREN 1 #define MMODE 0 #define PNRMODE 3 #define BPPMODE 13 #define INVVCLK 0 #define INVVD 0 #define INVVDEN 0 #define U32 unsigned int #define M5D(n) ((n) & 0x1fffff) #define PAGEWIDTH 320 #define OFFSIZE 0 #define LCD_XSIZE 320 #define LCD_YSIZE 240 #define SCR_XSIZE 320 #define SCR_YSIZE 240 #define INVVLINE 1 #define INVVFRAME 1 #define BPP24BL 0 #define BSWP 0 #define HWSWP 0 volatile U32 LCD_BUFFER[240][320]; unsigned char data_buffer[7] = {5*16+1,1*16+7,1*16+9,2*16+6,7,1*16+2,1*16+0}; unsigned char alarm_buffer[6] ={0,1*16+8,0,0,0,0}; unsigned char *temp; unsigned char str0[] = "��(d��ng)ǰ�r(sh��)�g��"; unsigned char str1[] = "��"; unsigned char str2[] = "��"; unsigned char str3[] = "��"; unsigned char str[][7] = {"������","����һ","���ڶ�","������","������","������","������"}; U32 flag, count, t, i; void Init_LCD(){ rLCDCON1=(CLKVAL����8)|(MMODE����7)|(PNRMODE����5)|(BPPMODE����1)|0; //�O(sh��)��CLKVAL��VCLK=HCLK/[(CLKVAL+1)*2],�Q��VM���|�l(f��)��ʽ���x���@ʾģʽ��BPPģʽ�����r(sh��)��Ҫ�_��LCD����?y��n)�߀�]���O(sh��)�ú� rLCDCON2=(VBPD����24)|(LINEVAL����14)|(VFPD����6)|(VSPW); //rLCDCON2��rLCDCON3��rLCDCON4��Ҫ�O(sh��)�Õr(sh��)�� rLCDCON3=(HBPD����19)|(HOZVAL����8)|(HFPD); rLCDCON4=(HSPW); rLCDCON5 = (BPP24BL����12) | (INVVCLK����10) | (INVVLINE����9) | (INVVFRAME����8) | (0����7) | (INVVDEN����6) | (PWREN����3) |(BSWP����1) | (HWSWP); //INVVLINE��INVVFRAME��Ҫ�M(j��n)�з��D(zhu��n)����?y��n)�CPU�l(f��)���������}�_��LCDʹ�õ���ؓ(f��)�}�_������Ҫ��׃�O�ԣ�PWRENʹ���Դ��̖(h��o) rLCDSADDR1=(((U32)LCD_BUFFER����22)����21)|M5D((U32)LCD_BUFFER����1); rLCDSADDR2=M5D(((U32)LCD_BUFFER+(SCR_XSIZE*SCR_YSIZE*4))����1 ); rLCDSADDR3=PAGEWIDTH*32/16; rLCDINTMSK|=(3); rTCONSEL = 0; rGPCUP = 0x0; rGPDCON = 0xaaaaaaaa; rGPCCON = 0xaaaa02a9; rGPDUP = 0x0; rGPGUP=rGPGUP&("(1����4))|(1����4); rGPGCON=rGPGCON&("(3����8))|(3����8); rLCDCON1 |= 1; //ʹ�ܔ�(sh��)��(j��)ݔ����LCD������̖(h��o) } void Paint_background(U32 c, U32 startx, U32 starty, U32 endx, U32 endy){ U32 i,j; for(j = starty; j �� endy; j++) for(i = startx; i �� endx; i++) LCD_BUFFER[j][ i] = c; } void SetTime(){ rRTCCON |= 0x1; rBCDSEC = data_buffer[0]; rBCDMIN = data_buffer[1]; rBCDHOUR = data_buffer[2]; rBCDDATE = data_buffer[3]; rBCDDAY = data_buffer[4]; rBCDMON = data_buffer[5]; rBCDYEAR = data_buffer[6]; rRTCCON &= 0xfe; } void GetTime(){ rRTCCON |= 0x1; data_buffer[0] = rBCDSEC; data_buffer[1] = rBCDMIN; data_buffer[2] = rBCDHOUR; data_buffer[3] = rBCDDATE; data_buffer[4] = rBCDDAY; data_buffer[5] = rBCDMON; data_buffer[6] = rBCDYEAR; if(data_buffer[0] == 0){ data_buffer[0] = rBCDSEC; data_buffer[1] = rBCDMIN; data_buffer[2] = rBCDHOUR; data_buffer[3] = rBCDDATE; data_buffer[4] = rBCDDAY; data_buffer[5] = rBCDMON; data_buffer[6] = rBCDYEAR; } rRTCCON &= 0xfe; } void Paint_text(U32 x, U32 y, U32 color, unsigned char ch[]){ int i, j, test,t = 0; for(i = 0; i �� 16; i++){ test = 0x80; for(j = 0; j �� 16; j++){ if(j == 8){ test = 0x80; t++; } if(ch[t] & test) LCD_BUFFER[x+i][y+j] = color; test ����= 1; } t++; } } void Paint_Ascii(U32 x, U32 y, U32 color, unsigned char ch[]){ int i, j, test; for(i = 0; i �� 16; i++){ test = 0x80; for(j = 0; j �� 8; j++){ if(test & ch[ i]) LCD_BUFFER[x+i][y+j] = color; test ����= 1; } } } void __irq Uart_ISR(void){ char buf; rSUBSRCPND |= 0x3; rSRCPND |= 0x1����28; rINTPND |= 0x1����28; if(rUTRSTAT0&0x1){ buf = rURXH0; if((buf == 0xaa) && (t == 0)){ t = 1; i = 0; rUTXH0 = 0xaa; } else{ if(t){ data_buffer[ i] = buf; i++; rUTXH0 = 0xdd; if(i == 7){ rUTXH0 = 0xbb; SetTime(); i = 0; t = 0; flag = 1; } } else{ rUTXH0 = 0xcc; } } } } //2010��12��26��������19:17:51 void ShowTime(){ U32 qh, wh; unsigned char s0,s1; int i, t, k; char h, l; GetTime(); //��(d��ng)ǰ�r(sh��)�g�� for(i = 0,t = 0, k = 0; i �� 5; i++){ s0 = str0[t]; s1 = str0[t+1]; qh = s0-0xa0; wh = s1-0xa0; temp = & __HZK[((qh-1)*94+wh-1)*32]; Paint_text(100,k,0x0,temp); t = t + 2; k += 16; } //: temp = &__ASCII[':'*16]; Paint_Ascii(100,k,0x0,temp); k+=8; //20 temp = &__ASCII['2'*16]; Paint_Ascii(100,k,0x0,temp); k+=8; temp = &__ASCII['0'*16]; Paint_Ascii(100,k,0x0,temp); k+=8; //10 h = (data_buffer[6]����4)+48; temp = &__ASCII[h*16]; Paint_Ascii(100,k,0x0,temp); k+=8; l = (data_buffer[6]&0x0f)+48; temp = &__ASCII[l*16]; Paint_Ascii(100,k,0x0,temp); k+=8; //�� qh = str1[0]-0xa0; wh = str1[1]-0xa0; temp = & __HZK[((qh-1)*94+wh-1)*32]; Paint_text(100,k,0x0,temp); k+=16; //12 h = (data_buffer[5]����4)+48; temp = &__ASCII[h*16]; Paint_Ascii(100,k,0x0,temp); k+=8; l = (data_buffer[5]&0xf)+48; temp = &__ASCII[l*16]; Paint_Ascii(100,k,0x0,temp); k+=8; //�� qh = str2[0]-0xa0; wh = str2[1]-0xa0; temp = & __HZK[((qh-1)*94+wh-1)*32]; Paint_text(100,k,0x0,temp); k+=16; //26 h = (data_buffer[3]����4)+48; temp = &__ASCII[h*16]; Paint_Ascii(100,k,0x0,temp); k+=8; l = (data_buffer[3]&0xf)+48; temp = &__ASCII[l*16]; Paint_Ascii(100,k,0x0,temp); k+=8; //�� qh = str3[0]-0xa0; wh = str3[1]-0xa0; temp = & __HZK[((qh-1)*94+wh-1)*32]; Paint_text(100,k,0x0,temp); k+=16; //������ for(i = 0,t = 0; i �� 3; i++){ s0 = str[0][t]; s1 = str[0][t+1]; qh = s0-0xa0; wh = s1-0xa0; temp = & __HZK[((qh-1)*94+wh-1)*32]; Paint_text(100,k,0x0,temp); t = t + 2; k += 16; } //19:17:51 //19 h = (data_buffer[2]����4)+48; temp = &__ASCII[h*16]; Paint_Ascii(100,k,0x0,temp); k+=8; l = (data_buffer[2]&0xf)+48; temp = &__ASCII[l*16]; Paint_Ascii(100,k,0x0,temp); k+=8; //: temp = &__ASCII[':'*16]; Paint_Ascii(100,k,0x0,temp); k+=8; //17 h = (data_buffer[1]����4)+48; temp = &__ASCII[h*16]; Paint_Ascii(100,k,0x0,temp); k+=8; l = (data_buffer[1]&0xf)+48; temp = &__ASCII[l*16]; Paint_Ascii(100,k,0x0,temp); k+=8; //: temp = &__ASCII[':'*16]; Paint_Ascii(100,k,0x0,temp); k+=8; //51 h = (data_buffer[0]����4)+48; temp = &__ASCII[h*16]; Paint_Ascii(100,k,0x0,temp); k+=8; l = (data_buffer[0]&0xf)+48; temp = &__ASCII[l*16]; Paint_Ascii(100,k,0x0,temp); k+=8; } void SetAlarm(){ rALMSEC = alarm_buffer[0]; rALMMIN = alarm_buffer[1]; rALMHOUR = alarm_buffer[2]; rALMDATE = alarm_buffer[3]; rALMMON = alarm_buffer[4]; rALMYEAR = alarm_buffer[5]; } void __irq EINT0_ISR(void){ rSRCPND |= 1; //SRCPND ͨ�^���딵(sh��)��(j��)���㣬��������㣬��(hu��)����(f��)�M(j��n)��Ո(q��ng)�� rINTPND |= 1; //INDPND ͨ�^��1���� flag = 1; } void __irq EINT2_ISR(void){ //ʹ��__irq�@��(g��)�P(gu��n)�I�ֶ��x�K�˷���(w��)���̣��@��ϵ�y(t��ng)��(hu��)�Ԅ�(d��ng)���҂�����һЩ׃�����������Д�̎��������_�ķ��� rSRCPND |= 1����2; rINTPND |= 1����2; rTICNT &= "(1����7); rGPBDAT = 0xfe; //������I�����£��P(gu��n)�]��(ji��)�ĕr(sh��)�g�Д� } void __irq Alarm_ISR(void){ rSRCPND |= 1����30; //SRCPND ͨ�^���딵(sh��)��(j��)���㣬��������㣬��(hu��)����(f��)�M(j��n)��Ո(q��ng)�� rINTPND |= 1����30; //INDPND ͨ�^��1���� rTICNT = (1����7)|(127����0); //�_����(ji��)�ĕr(sh��)�g�Д࣬�O(sh��)��ÿ1s�Д�һ�� } void __irq Tick_ISR(void){ rSRCPND |= 1����8; //SRCPND ͨ�^���딵(sh��)��(j��)���㣬��������㣬��(hu��)����(f��)�M(j��n)��Ո(q��ng)�� rINTPND |= 1����8; //INDPND ͨ�^��1���� if(count%2 == 0) rGPBDAT = 0x1; else rGPBDAT = 0xfe; count++; if(count == 20){ count = 0; rGPBDAT = 0; rTICNT &= "(1����7); //�Д�20�Σ�Ȼ��ֹͣ��(ji��)�ĕr(sh��)�g�Д� } } int Main(){ flag = 0; count = 0; t = 0; rGPFCON &= 0xffcc; //0 rGPFCON |= (1����1)|(1����5); rGPFUP = 0xfe; rGPBCON &= 0xfffc; rGPBCON |= 0x1; rGPBUP = 0xfe; rULCON0 = 0xfff00; rULCON0 |= 0x3; rUCON0 = 0x0800; rUCON0 |= 0x05; rUBRDIV0 = 26; rRTCALM = (1����1)|(1����6); //��Ҫȫ�ֈ�(b��o)��ʹ�ܣ�Ȼ���Ƿ�犈�(b��o)��ʹ�� rSUBSRCPND |= 0x3; rSRCPND |= (1����0)|(1����2)|(1����8)|(1����28)|(1����30); //����һ�� rINTPND |= (1����0)|(1����2)|(1����8)|(1����28)|(1����30); //����һ�� rINTMSK &= ("(0x1����0))&("(0x1����2))&("(0x1����8))&("(0x1����28))&("(0x1����30)); //�_�Д� rINTSUBMSK &= ("(0x1����0)) & ("(0x1����1)); pISR_EINT0 = (U32)EINT0_ISR; pISR_EINT2 = (U32)EINT2_ISR; pISR_TICK = (U32)Tick_ISR; pISR_RTC = (U32)Alarm_ISR; pISR_UART0 = (U32)Uart_ISR; Init_LCD(); Paint_background(0xffffff,0,0,320,240); SetAlarm(); SetTime(); ShowTime(); while(1){ if(flag){ Paint_background(0xffffff,0,0,320,240); ShowTime(); flag = 0; } } } ���f�i |