|
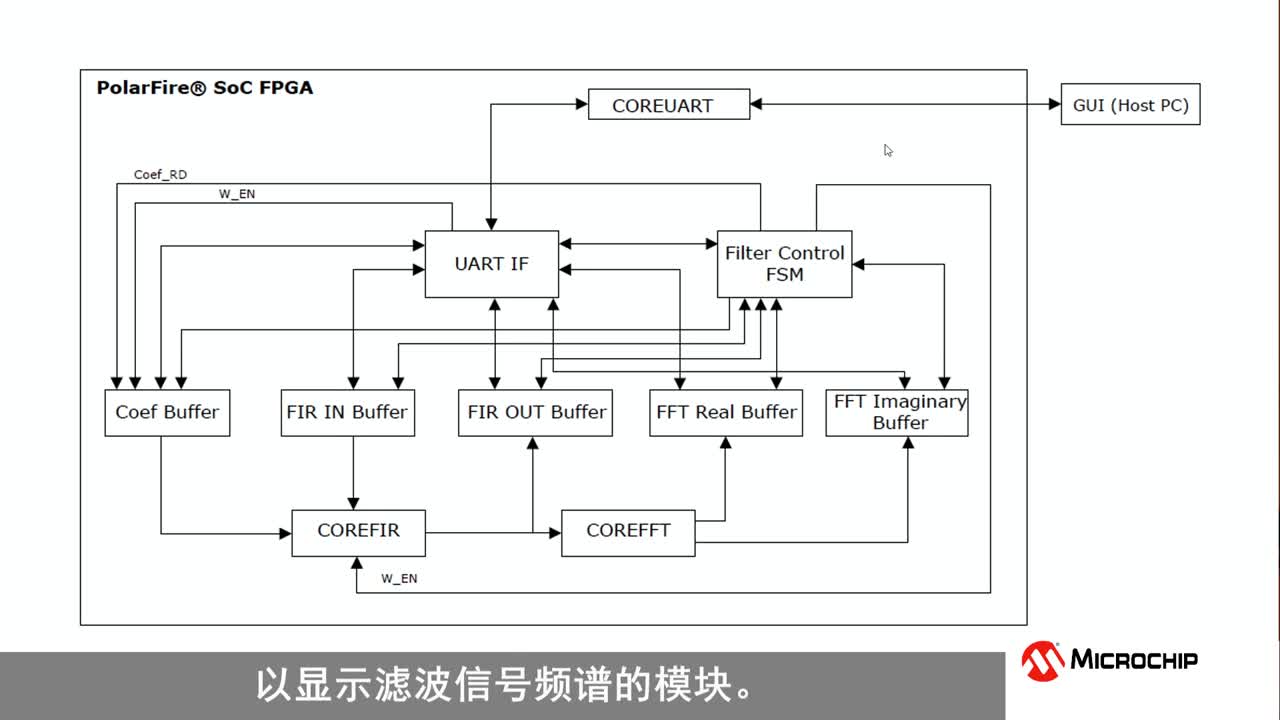
工業控制中往往需要完成多通道故障檢測及多通道命令控制(這種多任務設置非常普遍),單獨的CPU芯片由于其外部控制接口數量有限而難以直接完成多路檢控任務,故利用ARM芯片與FPGA相結合來擴展檢控通道是一個非常好的選擇。這里介紹用Atmel公司ARM7處理器(AT91FR40162)和ALTERA公司的低成本FPGA芯片(cyclone2)結合使用完成多通道檢控任務的一種實現方法。 各部分功能簡介 圖1為此系統的結構連接框圖。如圖所示,ARM芯片與FPGA芯片之間通過數據總線、地址總線及讀寫控制線相連,而與終端PC則通過串口通信;FPGA與目標設備通過命令控制總線和故障檢測總線相連。 圖1 系統結構框圖 1 故障檢測和命令控制部分 故障檢測:檢測通道的故障(正常)信號以高(低)電平方式指示,其一旦有故障產生就會保持高電平不變直到故障排除。針對這種特征,在ARM控制器端采用定時中斷循環查詢方式來判斷故障通道的狀態。定時中斷程序通過對ARM 地址總線在FPGA中進行譯碼而順序鎖定被檢測通道的電平值,然后再經數據總線傳回ARM進行判斷,最后將判斷結果送至遠程終端。采用主機查詢方式而不采用故障中斷方式出于兩個原因:一方面是通常控制芯片外部中斷源有限(多數為4個外部中斷源),對于多目標中斷信號檢測顯然是困難的;另一方面,由于檢測通道或設備受到短時干擾而產生電平隨機反轉,造成故障中斷觸發,而中斷觸發后又無法在通道電平恢復正常時撤銷故障信號,故而形成虛假報警。 命令控制:ARM芯片先判斷主控端發來的控制命令,然后通過地址總線和數據總線將命令狀態發送至經FPGA地址譯碼鎖定的控制通道上。 2 ARM芯片與遠程檢測控制終端通信 由于只存在命令和故障狀態信號的收發,所以利用ARM的串口實現與遠程PC的通信,通信標準選為RS232標準。不過,在ARM芯片上要先將TTL電平通過MAX232芯片轉換為RS232電平標準,對于距離超過15m的全雙工通信,在發送接收兩端還要各加一對RS232轉RS422電平的轉換模塊,以增加通信距離。 3 FPGA內部功能模塊說明 FPGA內部檢測及控制電路結構關系如圖2所示。 圖2 FPGA內部邏輯結構 ARM芯片的ADDR2~0位地址線和片選使能信號一同進入譯碼器decode1進行地址譯碼后產生8路輸出(FPGA內部可設置一個最大輸出為256路的譯碼模塊,所以在實際應用中可擴展為更多通道),低4路用于命令發送通道,高4路用于故障檢測通道,讀寫使能信號控制數據總線。 ARM芯片接收到發送信號編碼命令時,立即在串口接收中斷服務子程序中并送相應地址(通道編號)和數據(命令狀態)到FPGA中。譯碼器有效輸出作為相應通道D觸發器的鎖存時鐘,而數據狀態則被觸發器鎖定后作為所選通道的輸出完成相應控制。 ARM芯片在定時中斷產生進入服務程序后對所有檢測通道輪流查詢,查詢到有通道故障時,故障信號結合選中通路信號經與非運算送往數據端口被讀取。 FPGA程序設計注意問題 1延時的配置 通過地址總線和數據總線進行命令傳輸和故障檢測時,FPGA是作為ARM芯片的普通外設來使用的。而ARM芯片對外設訪問的速度要遠低于片內存儲器,所以要在ARM中設置訪問的正確等待周期。ARM中提供的延時周期為0~7個,通過調試即可找到外設合適的等待周期,此系統的等待周期根據實際測試設置為5個,具體的配置方法見ARM程序說明。 2 讀寫使能信號的連接 1 處理器的資源分配 ● 存儲器 AT91FR40162內嵌一個256KB的SRAM,1024K個16位字組成的Flash存儲器。SRAM通過內部32位數據總線與ARM核相連,單周期訪問,Flash存儲器則通過外部總線訪問。 ● 系統外圍 EBI:外部總線控制接口,EBI可尋址64MB的空間,通過8個片選線(NCS0~NCS3獨立)和24位地址線訪問外設,地址線高4位與片選線(NCS4~7)復用,數據總線可配置成8/16位兩種模式與外設接口。 PIO:并口控制器,PIO控制32根I/O線,多數為復用引腳,可通過編程選擇為通用或專用。 AIC:先進中斷控制器,實現片內外圍中斷及4個外部中斷源中斷的管理,其外部中斷引腳與通用I/O復用。 ● 用戶外圍 USART0~1:串口收發控制器,支持8個數據位的發送,可以進行異步/同步傳輸選擇,其片外引腳與通用I/O復用。 TC:定時/計數器,可以產生定時中斷和計數功能,其片外引腳與通用I/O復用。 2 存儲器地址重映射后的空間分配 在CPU上電后,都會從地址0開始第一條指令代碼的執行,而上電復位后0地址必須映射到NCS0片選所接的器件上,這里必須將NCS0連接到片內Flash上以加載初始化程序和應用程序。由于中斷和異常的入口地址是0~20H固定不變,它們的產生都是跳轉到0~20H之間相應的地址取程序執行,為了加快中斷響應,必須將0~20H地址映射到片內RAM區,所以在初始化的重映射命令執行(EB1_RCR的RCB位置1)后,內部RAM就映射到地址0,所有的中斷入口響應和堆棧操作都被映射到在RAM區進行。 由于重映射主要是用于Flash和片內RAM的地址空間交換,所以片內外圍接口(EBI、USART、TC)對應的存儲器編程地址范圍在映射前后不發生改變,而訪問外設地址為重映射后所分配。重映射后地址分配如表1所示。 3 應用接口的存儲器配置 EBI存儲器:在8個EBI片選存儲器(EBI_CSR0~EBI_CSR7)中設置外設訪問參數。其中,32位存儲器中包括數據總線寬度8(16)設置,等待狀態數目1~7個周期設置,等待使能(不是使能)設置,片選使能(不使能)設置。這里將FPGA作為外設,使能NCS3(也可根據實際選擇其他空閑片選線),選擇總線寬度16,使能等待周期并設周期為5(根據調試選擇)。因默認NCS0為加載Flash片選線,而Flash為16位信號、7個等待周期,故需在EBI_CSR0中選擇16位總線寬度、7個等待周期并使能NCS0。 AIC存儲器:AIC存儲器管理所有內外部中斷,對此存儲器的正確初始化賦值才會打開相應中斷。設定AIC工作參數:應用串口通信模式為異步模式,串口發送的數據位字符長度為8位,通信的波特率9600B/s,串口中斷優先級為6(中斷優先級由低到高0~7),接收發送通道使能。 TC存儲器:定時中斷存儲器需要設定定時長度為1s(每1s產生中斷進行故障查詢),定時通道使能及軟件觸發模式,定時中斷優先級設為1。 4 應用程序說明 ① 主程序 #define AT91C_BASE_EBI ((AT91PS_EBI) 0xFFE00000) //EBI基地址定義 int main() {AT91F_EBI_OpenChipSelect ( AT91C_BASE_EBI, //地址指針 0x3, //片NCS3使能 0x30000000+0x3f39); //片選存儲器初始化 Usart_init();//初始化串口 timer_init();//初始化定時器 while(1){} //循環等待 } ARM處理器在完成各寄存器初始化后進入應用主程序,在主程序中首先調用EBI接口使能函數來設置參數:在程序中設置存儲器基地址值(0xFFE00000),片選設置0x3(NCS3使能),NCS3的存儲器初始化;調用USART控制器函數初始化串口:打開串口,串口收發通道初始化,設定串口通信速率;調用定時中斷函數:打開定時中斷,設置定時中斷時間,設定觸發方式為軟件觸發;最后進入等待循環。 ② 串口命令接收中斷服務程序 #define USART0_INTERRUPT_LEVEL 6//設置中斷優先級為6 #define AT91C_US_USMODE_NORMAL AT91C_US_CHMODE_NORMAL//*設置通信模式(NORMAL定義為異步模式)*// AT91PS_USART COM0=AT91C_BASE_US0;//設置COM0為收發口 char message; // 控制端串口中斷通信程序 // //*----------------------------------------------------------------------------*// void Usart0_c_irq_handler(AT91PS_USART USART_pt)//串口中斷處理函數 { volatile unsigned int *conp;unsigned int status; int time; volatile unsigned int i; status = USART_pt->US_CSR & USART_pt->US_IMR;//給狀態寄存器賦初值 if ( status & AT91C_US_RXRDY)//接收通道寄存器判斷是否有數據 { AT91F_US_DisableIt(USART_pt,AT91C_US_RXRDY);//關閉接收通道準備好中斷 AT91F_US_EnableIt(USART_pt,AT91C_US_ENDRX);//打開接收結束中斷 AT91F_US_ReceiveFrame(USART_pt,(char*)(message),4);//調用接收數據數接收數據 } if ( status & AT91C_US_ENDRX){ AT91F_US_DisableIt(USART_pt,AT91C_US_ENDRX); // 關閉接收器傳送結束中斷 { if((message[0]^0xff)==message)//判斷接收代碼 {switch (message[0]) {case 0x31 : {conp=(volatile unsigned int*)(0x1+0x30000000);//OPE1使能 *conp=0x2;}; break;//0x31代碼送往OPE1端口 case 0x30 : {conp=(volatile unsigned int*)(0x2+0x30000000);//OPE2使能 *conp=0x1;}; break; // 0x30代碼送往OPE2端口 case 0x11 : {conp=(volatile unsigned int*)(0x3+0x30000000);//OPE3使能 *conp=0x2;};break;// 0x11代碼則往OPE3端口 case 0x10 : {conp=(volatile unsigned int*)(0x4+0x30000000);//OPE4使能 *conp=0x1;};break; //0x10代碼送往OPE4端口 default:break;} } } 以上程序為串口中斷服務程序,各函數語句說明參見注釋。中斷級別設置為6(高于定時中斷),這樣使命令發送優先于故障查詢(控制命令隨機出現而故障查詢總是循環進行);接收緩沖區message數組類型必須設為動態分配,靜態數據分配會使處理器開辟數據緩沖區到Flash芯片中,從而引發在一個中斷處理程序中由于存取時間過長而導致串口收發超時的錯誤。因為篇幅有限,其他程序不再一一敘述。 在ARM應用程序的編寫中,應該盡量少的在主函數內使用循環操作,主函數主要完成各接口控制器應用初始化,因為主函數不間斷循環操作不但會增加功耗,而且長時間頻繁切換于中斷服務和主循環之間會造成程序運行的不穩定,所以能用定時中斷完成的循環操作盡量用中斷完成。 結語 ARM芯片控制功能結合FPGA靈活的多硬件接口模擬特性在工程上體現出的其獨特的優勢,已發展為一種流行的硬件架構模式,隨著芯片功能的不斷強大,這種優勢將使其用途更廣,對任務處理變得更加靈活高效。 |