|
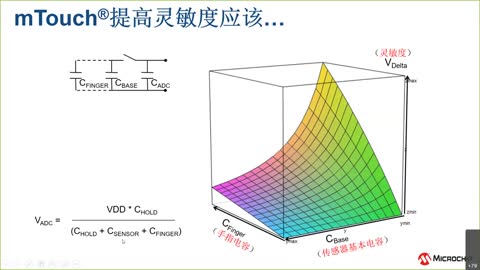
���S���Ƽ��l(f��)չ������M(j��n)�������δ֪�I(l��ng)���̽���������룬�܉��������M(j��n)��Σ�U�����ӭh(hu��n)�����I(y��)���b�����C(j��)�������g(sh��)Խ��Խ�ɞ��о��ğ��c(di��n)��19���o(j��)40�������������ؕ������(sh��)���ANL(Argonne National Laboratory)��������ں˭h(hu��n)����Model-M1�͙C(j��)еʽ���IJ����ֿ������b�����C(j��)���˵İl(f��)�ˡ�20���o(j��)60������ڣ������c�����ĺ�܊�_ʼ�ڝ�ˮͧ�ϰ��b�b�����ֺ͔z��C(j��)�M(j��n)����ˮ���I(y��)�����b�������g(sh��)��(y��ng)���ں���70����Ժ����Ƴ���ꑻ��ǵ��b�����C(j��)���ˣ�80���ĩ90��������Լ��ô�SPAR��˾�����20 m�L���b������RMS(Remote Manipulator System)��������F(xi��n)�ˎN�dz������Ŀ��g�b����ϵ�y(t��ng)��21���o(j��)�ԁ���Ϣ�W(w��ng)�j(lu��)���İl(f��)չ����ʹ�о��ߌ��W(w��ng)�j(lu��)���b�����C(j��)���˼��g(sh��)��Y(ji��)�ϣ����b�����C(j��)���˼��g(sh��)�����˾�׃��[2-4]����(d��ng)����(sh��)�ֈD����Ϣ��������Ҫ����Ϣ֮һ��Խ��Խ�V����ʹ�ã��˂��@ȡ��Ϣ��70%����ҕ�Xϵ�y(t��ng)��Ҳ�����f�����ж�ý�w��(sh��)��(j��)�У��D���ṩ����Ϣ����࣬���C(j��)���ː��ӭh(hu��n)�������I(y��)��r�ԈD�����ʽ��(sh��)�r�����o�����ң�������ͨ�^�D��@�ø���ĬF(xi��n)����Ϣ���@�N�b�����C(j��)�����е�ҕ�l�O(ji��n)�����g(sh��)�@�ÏV���đ�(y��ng)�ú��о�[5-6]�������M(j��n)һ����߷���ҕ�l�A(y��)�y���ȵ�H.263���s�㷨��Ŀ�ľ����ԱM���ٵ�bit��(sh��)�������D��ͬ�r���֏�(f��)ԭ�D����|(zh��)����ʹ�D���ھW(w��ng)�j(lu��)�ς�ݔ�ӕr�����S������(n��i)��������������ӕr�a(ch��n)�����`����[7-9]���mȻ�x���m��(d��ng)?sh��)ĉ��s�㷨���܉�M��D���ݔҪ���Ԝp�p�D��惦�͂�ݔ?sh��)��?f��)��(d��n)�������ڹ��I(y��)���a(ch��n)����Ҫ�C(j��)���˵ľ��_���I(y��)(�纸�әC(j��)���˺��ӕr���p��횾���(zh��n)�o�`)[10-11]����ˣ�������������ھW(w��ng)�j(lu��)���|(zh��)�(sh��)�F(xi��n)���ق�ݔ����(zh��n)�_���_(d��)����(sh��)�r̎�����z�y�C(j��)���˵����I(y��)���_��ʹ�C(j��)�����܌��`�������r�����{(di��o)���ļ��g(sh��)���}�ɞ��b�����C(j��)�����I(l��ng)���µ�����(zh��n)�� 1 ϵ�y(t��ng)���w�Y(ji��)��(g��u) ᘌ�������r������������ý�����(bi��o)��(zh��n)����(bi��o)ϵʹ�����C(j��)���˺ͷ���ҕ�l��ͬһ�����ںϵķ���������ģ���A(y��)�����I(y��)�΄�(w��)������ҕ�l�t��ۙ��܉�E�M(j��n)�����I(y��)��ͨ�^���ߌ��ȼ��r�l(f��)�F(xi��n)�C(j��)�������I(y��)��r��һ��Խ���`Ҏ(gu��)����ֹͣ��������Ҳ�ܸ���(j��)���ߵı��^�˽�F(xi��n)���h(hu��n)��������F(xi��n)�ϵK���C(j��)���˂����¼��r������������һ�������Ա���Σ�U�l(f��)����ϵ�y(t��ng)���w�Y(ji��)��(g��u)��D1��ʾ�����w�������̣��z���^�ɼ��挍(sh��)�C(j��)���˵�ҕ�l��(sh��)��(j��)���͵�����(w��)���ˈD��ɼ������o�B(t��i)��(n��i)���Ќ����M(j��n)��H.263���s��ҕ�l��(sh��)��(j��)���s��(j��ng)�W(w��ng)�j(lu��)��ݔ�͵��͑��C(j��)�ˡ��͑��C(j��)����(sh��)��(j��)�M(j��n)�н≺��߀ԭ���@ʾ���ڷ���ģ�ͽ����@ʾҕ�lʹ�����ںϣ�ͬ�r�͑��C(j��)��(sh��)�F(xi��n)������������������������ҕ�l�ں�ģ�K��ҕ�l̎��ģ�K�Ϳ���ģ�K��ҕ�l�ں�ģ�K��ҕ�l�M(j��n)������(y��ng)������(bi��o)׃�Q��ʹ��ͬ����C(j��)������һ���������غ��@ʾ��ҕ�l̎��ģ�K����ҕ�l�Ŵ�ҕ�l�sС��ҕ�l���桢���_ҕ�l��ҕ�l�؈D����λ�D����JPEG�D�����_λ�D�����_JPEG�D�ȹ��ܡ��������S���wģ�Ͳ���3DSMAX��������OPENGL���̭h(hu��n)�������M(j��n)������(y��ng)���L�Ƽ����ơ�����ҕ�l��(sh��)��(j��)��(j��ng)���s����ݔ���≺������(y��ng)������(bi��o)׃�Q�������s�ź��ڿ͑����@ʾ������(w��)�����ҕ�l�ɼ������s���惦����ݔ���͑��C(j��)��ɷ���ģ�Ϳ��ơ��≺���@ʾҕ�l���Լ���ҕ�l�M(j��n)������(y��ng)�ķŴsС���؈D�����档���ھW(w��ng)�j(lu��)��ݔ�����ӕr�������@�N�ӕr���˂�ݔָ�����x����Ĺ̶��ӕr��ָ���(zh��)���ӕr�⣬߀��һЩ�S�C(j��)�_���ӕr������@�N�ӕr���܉r�l(f��)�F(xi��n)�������߸���(j��)ҕ�l�����������e�`�Дࡣ����(j��)�@�N��r�ڿ͑����L�ƽ��Ք�(sh��)��(j��)�ֹ�(ji��)������������ֱ�^���^�쵽�W(w��ng)�j(lu��)��r��ҕ�l��ݔ?sh��)�Ӱ푣���D2��ʾ�� ����ģ�K��D3��ʾ������ÿ���P(gu��n)��(ji��)�Ć��ӡ�ֹͣ���o���ٶ�ݔ�����ٶ�׃��ݔ���@ʾ�� 2 ����ģ�ͽ�����ҕ�l�ںό�(sh��)�F(xi��n) 2.1 ͨ�Ž����cҕ�l��ݔ �W(w��ng)�j(lu��)ͨ�ŷ֞�ͬ����ʽ�ͮ�����ʽ��ͬ����ʽ�ǰl(f��)�ͷ����Ƚ��շ�푑�(y��ng)��������l(f��)��һ����(sh��)��(j��)����ͨ�ŷ�ʽ��������ʽ�ǰl(f��)�ͷ��l(f��)����(sh��)��(j��)���յ����շ��l(f��)�ص�푑�(y��ng)���Űl(f��)��һ����(sh��)��(j��)����ͨ�ŷ�ʽ����ϵ�y(t��ng)�_�l(f��)���ǿ͑���/����(w��)��(C/S)�Y(ji��)��(g��u)��ܛ����ԓܛ���Ǯ���������ģʽ����ģʽ�ă�(y��u)�c(di��n)�Ǽȿ���ͬ����(zh��)�У�Ҳ�����دB��(zh��)�С��D���ھW(w��ng)�j(lu��)�Ђ�ݔ�r�����ɱ����Ҫ���浽��ݔ�f(xi��)�h�Ć��}��TCP/IP��һ�M�f(xi��)�h�����еӵąf(xi��)�hTCP��UDP���ڈD��Ă�ݔ�������P(gu��n)��Ҫ�����á�TCP�������B�ӵģ����ڶ��c�˵�ͨ���У�TCP�f(xi��)�h����һ�l���c��֮�g��̓�·��UDP��һ�N����o�B�ӵģ���ȡ������У�C(j��)�ƣ��܉��_(d��)���ܸߵ�ͨ��Ч�ʣ����m���ڿɿ���Ҫ�ߵĔ�(sh��)��(j��)��ݔ�����ڱ��C(j��)����ϵ�y(t��ng)��ҕ�l�āG����rҪ�ߣ��ʲ��ÿ͑�/����(w��)��ģʽ��UDP�f(xi��)�h��ʽ��ҕ�l��ݔ����UDP��ݔ������Socket�ֱ�ӂ�ݔ�D��(sh��)��(j��)���͑����{(di��o)���Ԍ�show����(sh��)��OPENGL���̭h(hu��n)�����L�Ʒ���ҕ�l����(sh��)�F(xi��n)ҕ�l�٬F(xi��n)��ϵ�y(t��ng)�У�ʹ��MFC���_�l(f��)ͨ�ų��������档�@�����MFC��Ҫ�ǻ��ڴ��ں��ęn�đ�(y��ng)��ܛ�����̣��������˴����Ĕ�(sh��)��(j��)�ͷ��������S���������΄�(w��)���瑪(y��ng)�ó����ʼ�����ęn̎���ʹűPI/O���b��������ʹ���ߵľ��̎����˾�ķ��㡣 2.2 ����C(j��)����ģ���L�� ����3DSMAX����MOTOMAN�C(j��)�������S����C(j��)����ģ�ͺ���Deep Explortation�D(zhu��n)�Qܛ���D(zhu��n)�Q��VC���a����VC�Ĺ����O(sh��)���м���OPENGL��朽ӎ죬�������̲��{(di��o)���D(zhu��n)���ķ���C(j��)���˴��a���ڄ�(chu��ng)�����b�롢���ģ��׃�Q��ͶӰ׃�Q��ꇕr���õ��ї�������һ����f����ꇶї������ژ�(g��u)������^���Ե�ģ�ͣ�����һЩ����Ŀ��(bi��o)��(g��u)�ɵď�(f��)�sģ�͡�MOTOMAN�C(j��)���˷���ģ���У���(f��)�s�ęC(j��)е�ֱ����ɶ������ε��L���w����(j��)�^���P(gu��n)ϵ��(g��u)�ɵģ����@�N�^���P(gu��n)ϵ�ɾ�ꇶї����Q�����C(j��)е�ֱۡ��P(gu��n)��(ji��)�����������Ռ�(sh��)�H�C(j��)���˵ı����M(j��n)������(y��ng)�s�š�Ҏ(gu��)�����˵���������(bi��o)ϵ�������P(gu��n)��(ji��)���ֱۄt����(j��)���������w�ߴ����Ӌ�������(bi��o)λ���M(j��n)���L�ơ����C(j��)����ģ����3��֧�ε�����4�����D(zhu��n)�P(gu��n)��(ji��)��1���M����1���Q������צ������һЩ�㲿����(g��u)�ɣ�����C(j��)����ģ����D4(a)��ʾ�������^���Ա��F(xi��n)�ڮ�(d��ng)ĩ�ˈ�(zh��)������צ�\(y��n)�ӕr(�紹ֱ����)���������P(gu��n)��(ji��)3���φ��ӣ�Ȼ���P(gu��n)��(ji��)2����צ�����D(zhu��n)�ӣ��������P(gu��n)��(ji��)1�D(zhu��n)�������C(j��)���˴�ֱƽ�ƣ�����M(j��n)����ȥ�������C(j��)���˅f(xi��)�{(di��o)��ϱ���ĩ�ˈ�(zh��)����(��צ)��ֱ���������Sģ����OPENGL�е��@ʾ�����ǣ���������(bi��o)ϵ�е����S���w��(j��ng)���S��׃�Q��ͶӰ���M(j��n)�����S�ü���ҕ��׃�Q���������Ļ����(bi��o)ϵ���@ʾ�D�Ρ� 2.3 ҕ�l�ںϼ����ƌ�(sh��)�F(xi��n) ����C(j��)���˵���ҕ�c(di��n)����(bi��o)ϵ�_����ҕ�l�C(j��)���˸���(j��)����C(j��)���˵Ĵ�С�M(j��n)�пs���L�ƣ�ʹ����ͬ����C(j��)���˵�����һ������(bi��o)λ�á�ҕ�l�ЙC(j��)���˵���������ͬ����һ���M(j��n)������(y��ng)��ӳ�䣬��ˣ���ʼ�r��ҕ�l�ͷ���ģ�͵��P(gu��n)��(ji��)��ҕ��λ���ǻ����غϵġ�ҕ�l�ںϽ���ͨ�^VC�ؼ�SLIDER�{(di��o)��(ji��)ҕ�l���ȣ������߸���(j��)��(sh��)�H��r�x�������ȣ�Ҳ���Ԍ�����ҕ�l�O(sh��)�ó���ȫ��(�˕rֻ�ܿ���ģ�Ͷ�������ҕ�l)��������C(j��)������OpenGL���S�����Ќ�(sh��)�F(xi��n)3DSMAX��(sh��)��(j��)ģ�͵ij�����ơ�3DSMAX��һ�N�����ݵĽ�ģܛ������ͬ�ܛ���M(j��n)һ�������˽�ģ���ܣ�����(c��)���ڏ�(f��)�sģ�͵Ľ�ģ�����Ժ�������C������OpenGL�Y(ji��)�ό�(sh��)�F(xi��n)�D�ΌW(xu��)�㷨���ٰѱ��㷨������Ƕ��3DSMAX�h(hu��n)���У������ÿ��]���wģ�͵����ɺ�̎���ď�(f��)�s���a������3DSMAX����ȾӋ�r�����Է���ؙz������㷨��Ч�ʺ�Ч��[12]���ڷ���C(j��)���������r��(y��ng)��ѭһ��ԭ�t�����܉��Cҕ�XЧ����ǰ���£��M�����ñ��^���ε�ģ�ͣ��������܉��Å���(sh��)��������(g��u)���Č���M���Å���(sh��)��������(g��u)����ͬ�r����ģ�̈́�(chu��ng)���^���У���ģ���M(j��n)�зָ��(d��)����ģ���������M(j��n)�в����Ϳ��졣����C(j��)����ҕ�l�ں�ǰ����D4��ʾ�����Ƴ���?q��)��F(xi��n)����ģ�Ϳ��ƣ������^���ǣ���������(y��ng)�������o��2������ͬ�r�\(y��n)�У�1�����̌�����ָ����͵�����ģ��ʹ̓�M�C(j��)�����\(y��n)�ӣ���1�����̌���������ͨ�^�W(w��ng)�j(lu��)��ݔ�͵�����(w��)�������挍(sh��)MOTOMAN�C(j��)�������һ�����I(y��)���ڷ���ģ�ͺ�ҕ�l�ںϽ����У�ģ�����^��܉�E�ڳ������üt����(bi��o)��(�鷽���^���ߣ��tɫ܉�E������10�����صĴ�(sh��)���L��)������ҕ�l�S���ۙ��܉�E�\(y��n)�У��������^��ҕ�l�ЙC(j��)���˵��\(y��n)����r���Д��\(y��n)���Ƿ��_(d��)��(bi��o)���Q����һ���� ԓҕ�l�ںϷ�����(y��ng)�����b�����C(j��)����ϵ�y(t��ng)�У��܉�ʹ�����ߜ�(zh��n)�_�Д��C(j��)�������I(y��)����(zh��n)�ȣ�ͬ�r�����y(t��ng)���b�����C(j��)����ҕ�l�O(ji��n)�ؼ������A(y��)�y��Y(ji��)�ϣ������ҕ�l�ںϑ�(y��ng)�����b�����C(j��)���˼��g(sh��)�С���(sh��)�Y(ji��)���������@�N�������ھ���(zh��n)��Ҫ��ߵęC(j��)����ϵ�y(t��ng)�dz���(sh��)�ã��������Ԍ�ԓҕ�l�ںϷ�����չ�ړ��U�Ȟ�(z��i)����(z��i)���{(di��o)�顢�����\(y��n)�С�ˮ���O(ji��n)�y�������{(di��o)���У������܌��F(xi��n)����ɱO(ji��n)�y��D���ݔ?sh��)ȹ����⣬߀���Ա��^�A(y��)�y�c��(sh��)�H�IJ�� |