|
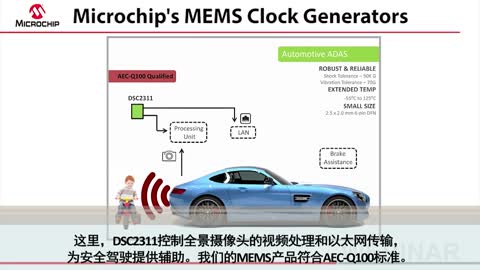
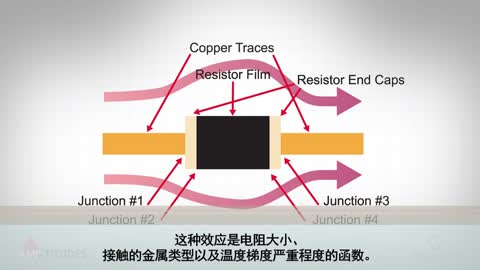
�����܇��ȫϵ�y(t��ng)�Ƅ���MEMS�T�����������g(sh��)�İl(f��)չ��Ҳ������(y��ng)���ڎׂ������I(l��ng)�����c��܇��ȫϵ�y(t��ng)���P(gu��n)�đ�(y��ng)�ô��M(j��n)�ˌ�MEMS���켼�g(sh��)�����b����|(zh��)�����Cϵ�y(t��ng)�Լ��O(sh��)Ӌ������(chu��ng)�µȷ���ľ�Ͷ�Y���@ЩͶ�Y��(d��o)���˳ɱ�Ч����ߺ��ɿ��Ľ�Q�������@Щ����Ҳ���S�������I(l��ng)����@ȡ�������������Α�ƽ�_(Wii Remote)�Լ��S���Ƅ��ֳ֑�(y��ng)�á����⣬MEMS������߀�l(f��)�F(xi��n)��������������Ĺ��I(y��)��(y��ng)�ã�����܇�g��ȫϵ�y(t��ng)�������O(sh��)��λ�Â��У���ײ�z�y����ֹ��܇�e��r��܇�ȶ���܇�g��ȫϵ�y(t��ng)����đ�(y��ng)�Ì�(sh��)���������@Щ��������MEMS����Ӌ�� ܇�g��ȫϵ�y(t��ng)���΄�(w��)�Ǚz�y���ڵ�Σ�U�����l����������Ӱ������IJ��������������Ҫ�ľ����Á�z�yΣ�U�����l���Ă��з����ľ��ȡ��c�����^�����(sh��)���g(sh��)����һ�ӣ�MEMS����ӋҲ���ڳɱ�����֮�g�����С�������܇�����Ñ�(y��ng)�Á��f������ͳɱ��팍(sh��)�F(xi��n)�m�ȵ����ܼ��ɡ�������һЩ���I(y��)��(y��ng)�ã�����܇�g��ȫϵ�y(t��ng)���tҪ���^�ߵľ��ȡ����@�N��(y��ng)���У��ɿ��ԣ��������Լ�������Ԫ�����ɱ�������Ҫ�� �S�����ɶȺ����ܵļ���Ӌ�a(ch��n)Ʒ�ij��F(xi��n)��ϵ�y(t��ng)�O(sh��)Ӌ����Ҫ�˽���������У��(zh��n)�ģ���?y��n)��@�Q����������ُ�I�@ЩУ��(zh��n)����߀���_�l(f��)�Լ���У��(zh��n)�����Č�ӑՓ�p�S����Ӌ��У��(zh��n)��ˇ��������ӑՓ�Ҋ���`��Դ�� У��(zh��n)��Ŀ�ĺͱ�Ҫ�� �����S��MEMS�T�Ԃ������Ñ���f��У��(zh��n)�������Ă��з����ṩ�˸��M(j��n)���ܺ�����ϵ�y(t��ng)�ɱ��ęC(j��)������D1��ʾ���D����ʾ�ăH�H��һ����P(gu��n)ϵ��������Ŀ��(bi��o)�t���܉�?y��n)��Ñ���ֵ�ĽK��ϵ�y(t��ng)�����������(q��)�ӡ� ���磬�߾�����ζ�������D(zhu��n)ϵ�y(t��ng)�ڴ_����܇�ĘO�ޕr�o���^�a(b��)��������ˮƽ����у�(y��u)���܉�U(ku��)���܇�ķ���(w��)��������������ص��d�ɣ��қ]�з�܇��Σ�U�����ԣ��ڰ�ȫ����ϵ�y(t��ng)�Ѓ�(y��u)�����ܵĵ������܉�?y��n)鿂ϵ�y(t��ng)��ֵ�� �cУ��(zh��n)���P(gu��n)�ijɱ����Ӱ���ֱ�ӵIJ��ϳɱ�(��ADC���C(j��)��PCB��(f��)�s�ȵ����ӣ��Լ��ڄ����ɱ�)��Ͷ�Y�ɱ�(У��(zh��n)�O(sh��)��A�ߺ����_�l(f��)�ɱ�)�����^�@Щ�ɱ��������A(y��)�ڵ�ϵ�y(t��ng)�a(ch��n)Ʒ���������������κ�У��(zh��n)�^�̵��@ҪĿ��(bi��o)���nj�(sh��)�F(xi��n)�rֵ���ߵ����ܣ�ͬ�r�������P(gu��n)�ijɱ��� �D1�������S��MEMS�T�Ԃ������Ñ���У��(zh��n)�������Ă��з����ṩ�˸��M(j��n)���ܺ�����ϵ�y(t��ng)�ɱ��ęC(j��)���� �ڈD1�е������c�ɱ��Č��������У��L����һ��ʹ�����õ�У��(zh��n)������һ���^��ķ���֮�g�IJ�e��ͨ�^�����ͽ����L(f��ng)�U�����Ŭ�������܉�_��һ���o��ˮƽ�����ܸ������軨�M(f��i)�ijɱ�����ֻ��Ҫ��һ���e�`���{(l��n)ɫ�^(q��)���Ƅӵ��tɫ�^(q��)�� һ��MEMSУ��(zh��n)�������_�l(f��)���Է֞��Ă������A�Σ� 1.�_������Ŀ��(bi��o) 2.�_��У��(zh��n)���� 3.�O(sh��)ӋУ��(zh��n)��ˇ 4.��(sh��)�F(xi��n)У��(zh��n)Ҏ(gu��)�t �����ӋУ��(zh��n)�_���Ѓrֵ������Ŀ��(bi��o)���������аl(f��)�^�̶��{(di��o)�����ȣ��@ЩĿ��(bi��o)��ָ��(d��o)���������x����Σ���������^���ṩָ��(d��o)�����@Щ�����^�̌��_����ҪУ��(zh��n)���О飬��K���Q��У��(zh��n)�^�̵ď�(f��)�s�ȡ��@�Ǻ��P(gu��n)�I�ģ���?y��n)��^����������茢��(d��o)���^�ߵijɱ����_�l(f��)�r�g�� ���Ǻ����@���@Ҫ���_�l(f��)�̼����˽����Ӌ����ϵ�y(t��ng)����Kϵ�y(t��ng)����Ŀ��(bi��o)��Ӱ푡��M���@�N����Ͷ�Y�������Dz�����ģ������s����(d��o)�¸��õ����ܲ���(chu��ng)�����Ą�(chu��ng)�C(j��)������ӑՓ�������ڮ�(d��ng)У��(zh��n)�C���`��С��1%�r��Ҫ���]���I(l��ng)�� �D2�����͵ļ���ӋУ��(zh��n)�· �`�����ȷ�����һ���Á��ṩУ��(zh��n)�ļ���Ӌ���ܵĵ����·��D2��ʾ��ԓ�`������_����ÿ������������ϵ�y(t��ng)����Ŀ��(bi��o)���a(ch��n)����Ӱ푡�ÿ������������Ҫ���]���О����ء�����MEMS����Ӌ֮�⣬�Ŵ�����A/D����(f��)�����͟oԴԪ�������ʬF(xi��n)һ����ƫ����桢���ζȡ������Դ�Լ��ضȶ����ʬF(xi��n)��(d��)�����О����������ڂ��������܁��f���@Щ����Ҫ�м�(x��)�ؿ��]�ڃ�(n��i)�� ����(ji��)�����e����������Ŀ��(bi��o)�ij�Ҋ���{�����ڱ�����w���·������ͬ�r���o����ο��ٴ_����Ӱ푵ķ��������˺��Σ���ӑՓ�Ќ����ȷ��������ڂ����������ϡ��ٶ������·Ԫ����ؕ�I(xi��n)�^С������һ��MEMS���������κξ��Ԃ����������뷽�̞飺 ��IEEE-STD-1293-1998�У��o����һ����������MEMS����Ӌ�`���О�ďV����ģ�����������µķ��̄t�o���������S�ೣҊ�`��ĺ����P(gu��n)ϵ�� ��������̖�{(di��o)��(ji��)�·�������ׂ�Ӱ�ԓ���̵Ďׂ�Ԫ�����������г����@Щ�����IJ��ֳ�Ҋ�`��Դ�� 1. NENS����Ӌ 2. �Ŵ��� 3. �oԴԪ�� 4. A/D ÿ�������������`����(����)��ƫ��(ƫ��)�����Զȣ�������ه���Դ���О������Լ���ه�ڜضȵ���������ؕ�I(xi��n)���@����ӑՓ��У��(zh��n)�������ڂ������ϡ����^�Dʾ��(zh��n)�tҲ�m���������·�� ����Ҫ��C���`��С��1%���҂����Կ��ٻ��һ�����õ�MEMS��������ָ��(bi��o)�����磬һ���I(l��ng)�ȼ���Ӌ��(y��ng)��������ָ��(bi��o)�� �`���ȣ�+950mV/g��+1050mV/g����ͬ��5% ƫ�ƣ�30mg(����ֵ)���ஔ(d��ng)��3%(1gϵ�y(t��ng)) ����100mg(���ֵ)���ஔ(d��ng)��10%(1gϵ�y(t��ng)) �����У�У��(zh��n)�^���б����Ҫ���]ƫ�ƺ��`���ȣ���?y��n)��@���߶�������1%�ľC���`��Ŀ��(bi��o)�� ���ڵ�g����Ӌ��һ���ɿ���У��(zh��n)Դ��������ʹ����������η�����ͨ�^����IEEE-STD-1293-1998�����o�����ИI(y��)��(bi��o)��(zh��n)����yԇ��ԓ����yԇ�У���һ��׃��������+1g�ļ���ʩ�ӵ����y������(DUT)�� ԓ�ͼ���ˮƽ�������ڝM�̶�����С��20g�ļ���Ӌ�ĵ���yԇ����?y��n)����ӵ�У�?zh��n)������ڻ���ڝM���̵�5%����ԓ����֮�⣬���Զȡ��ֱ��ʡ����������c�������P(gu��n)�����Ԍ�׃�ø���Ӱ�������ֹ�������ľ��ȵČ�(sh��)�F(xi��n)������У��(zh��n)���M�̶��������S4�c(di��n)����yԇ�����Ƕ��c(di��n)����yԇ�������c(di��n)�yԇ�������ھ��Զ��`���Ӌ�㡣 �D3�����c(di��n)����yԇ�D�⡣ ���c(di��n)����yԇ�ĺ����Dʾ�ڈD3�С��@�DUT���Qֱ�ġ�DUT��X�Sָ��0��Aб��ˮƽ�S��ӛ�DUT��X�Sݔ����Ȼ��DUT�քe���D(zhu��n)90�㣬180���270�㣬ӛ�ÿ�c(di��n)��X�Sݔ�����ʌ���(y��ng)�Ă��y��λ�á� �D4�����c(di��n)���䔵(sh��)��(j��)ݔ�� ����DUT�����D(zhu��n)��X�S�Ă�����ݔ�����ǃAб�ǵ����Һ���(sh��)����D4��ʾ����(sh��)�H��������������֮�������ڼ���Ӌ��ƫ�ƺ��`�����`������(d��o)�¡�ͨ�^��ÿ��90�����D(zhu��n)�����ϵĔ�(sh��)��(j��)�M(j��n)�з������@Щ�О���Ա����Ի������x������ͨ�^��0���180���c(di��n)��ȡƽ������Ӌ�����������������ƫ�������ڏ�90��Ĕ�(sh��)��(j��)�c(di��n)�Ϝpȥ 270���c(di��n)�ϵĔ�(sh��)��(j��)�����ɵõ��������ṩ��1g����ļ���Ӌݔ���Ĝy��ֵ�� �@Щ�P(gu��n)ϵ�Ļ��A(ch��)��0�㣬90�㣬180�㣬�Լ�270��λ�õľ��_����(zh��n)��߀ȡ�Q��ʮ���1g������Qֱ�����ϵľ��_����(zh��n)�� �����������ġ��y���`���ȼȲ���(sh��)�HҲ�o�����ܵ��𣬶���Ҫ�����˽⌦ÿһ�������`��(У��(zh��n)ϵ�y(t��ng)��������)���`������Ρ��_��ÿһ���`���Ӱ푌��������ڽ����`���P(gu��n)�I���ܜ�(zh��n)�t���L(f��ng)�U�� ��ʼ���R�ǶȽ^���`��ָ������ʼλ���`�ԓ��ʼλ���`�Ӱ��`���ȣ�����Ӱ�ƫ�ơ�ԓӰ푿��Ա����x����Ӱ��������`���ȣ����ҿ�������ʽ������ ����1%���`�����`���ʼ���R�`����С��8�㡣����`�����`����ߣ�����0.1%���t��ʼ���R�`��ͱ��С��0.8�㡣Ȼ����ԓ�^�����`�0��� 180��ɂ�λ���ϵ�Ӱ��ǵ�ͬ�ģ�����ԓ���R�`�Ӱ�ƫ�ơ��@�Dz���4�c(di��n)�y��������һ����(y��u)�c(di��n)��һ���õ���(sh��)�H��ƫ�ƣ�����Ӌ�����ʼ���R�`� ����`���Ⱦ���Ŀ��(bi��o)Ҫ���Ԓ�����Ԍ�Ӌ����Č��R�`�����������`��̣����Á�����У��(zh��n)���ӡ��@�ӣ��������˱�회���ʼ��ʼ�Ƕ��ھ��_��0��ĉ����� �`������cӋ�� �������R�`�ԓ�`����x��ÿһ���y�����M(j��n)�g�c�����90�㲽�M(j��n)ֵ֮�g��ƫ�ƫ��У��(zh��n)����ԓ�`�����^�ߵ��`���ȡ��������������P(gu��n)ϵʽ��Ӌ���Ќ��R�`�������ƫ���`� ����(y��ng)��1%��ƫ�ƾ���Ŀ��(bi��o)�������f��1g���̑�(y��ng)���е�10mg�����R���ȱ�횃�(y��u)��0.57�㡣������0.1%��ƫ�ƾ��ȣ������f1mg���t�������R���ȱ�횃�(y��u)��0.057�㡣�M�ܳ�ʼ���R�`�������Ӌ�㣬�����ڸ߾��ȵ�У��(zh��n)���f�������Ƕ��`���ȄtҪ���(y��n)���λ�ÿ��ơ� ƫ�x�S���`�ƫ�x�S���`��ָ�����S��������ˮƽ�S��׃��������������D(zhu��n)�O(sh��)����ȫ��ֱ���t�f�����D(zhu��n)�S��ˮƽ�ġ�ƫ�x�S���`�Ӱ��`�����`���Ӱ푵ķ�ʽ�c��ʼ���R��Ӱ푷����dz���ơ� �@������Ҫע���������ٶ�׃������?y��n)?g���ⲿ����δ���Ǿ��_��1g����Ӱ�ǡǡ�DZ�������Ӱ푵�2��������߀�S����Փ������׃������Փ����߀�ܵ����ȣ���ƽ�����ǣ�����-̫����������Լ������ij����|(zh��)����Ӱ푡� �C(j��)е��ӣ��κ���ʽ����Ӷ������D(zhu��n)�Q�ɞ龀�μ��ٶȣ�����У��(zh��n)�����`����û����rʯ�K��՚���x������Y(ji��)��(g��u)�ęC(j��)е���x���������ڽ����`�Ҳ���Բ��Ô�(sh��)��(j��)�V����������������ȱ�ݡ� ����Ӌ�`�����`�Ӱ푼���Ӌ�`�������Եăɂ�����Ҫ���������Դ늉��͜ضȡ����A(y��)�ڵ��Դ�͜ضȷ����ϣ�Ҳ���Բ������c(di��n)���䌦����Ӌ���О��M(j��n)�����Ի������Աƽ�����Ҫ����ÿ������(sh��)�ĘO��λ��(��С�����)�ϲɼ����c(di��n)���䔵(sh��)��(j��)������(j��)����Ҫ���@Щ��(sh��)��(j��)���Ա��Á���������У����(sh��)������l(f��)�F(xi��n)�Ǿ����О飬�������Ӹ���Ĕ�(sh��)��(j��)�c(di��n)��ͬ�r���������M�ϵ��A��(sh��)�� �Դ�`�ijЩ����Ҫ��Ҫ���Դ׃����Ӱ��M(j��n)�����Ի�����(d��ng)��Ҫ�r�������ڲ�ͬ���Դ�ƽ�ϲ�����ͬ�����c(di��n)����yԇ�����ɼ����m�������M������Ĕ�(sh��)��(j��)�������M�ϵď�(f��)�s���c����Ŀ��(bi��o)���`�����������|(zh��)�o�P(gu��n)���Y(ji��)������һϵ������ÿ���Դ�l����У��(zh��n)ϵ��(sh��)�� �ض��`������ڜض�׃���r���֣������`���(y��ng)ԓ���]�����`���Ⱥ�ƫ�ƵĜض�ϵ��(sh��)�� �`���ȣ�0.3%(���ͷ�����-40��C��+125��C) ƫ��=0.1mg/��C(����ֵ) ���ڿ��ٹ�Ӌ���@Щֵ���Է���(���O(sh��)����)���Y(ji��)����ʽ�� �ضȵľC���`��飺 ������ļ��ٜy����1g��ԓ��ֵ�����ھS��1%�C�ϟ��`��Ŀ��(bi��o)�ėl���£����Á�Ӌ��ضȿ���׃���ķ����� �п��܌�����(j��)ԓУ��(zh��n)�^��Ӌ�������У������ʩ�ӵ��S����(sh��)��ƽ�_�ϡ��@Щ���Ӱ�������������(sh��)����̖̎�����F(xi��n)���ɾ����T���(FPGA)���Լ������ɾ���߉������У����ʽ�����̎�����YԴ����Ӱ푵�̎�������x�����S��I(y��)ϵ�y(t��ng)�У�̎����߀�и���Ҫ�������У������Ĕ�(sh��)�W(xu��)����߀���������εģ� (1)ͨ�^�����\(y��n)�������ƫ��/ƫ���`�(2)���ö��ز������������`� �ڑ�(y��ng)���У����I(y��)ϵ�y(t��ng)�ڹ����l�������׃����Ӱ�MEMS����Ӌ��ƫ�ú��`���ȡ��Ҋ��Ӱ��@Щ���ԵĹ����l�����Դ늉��ͭh(hu��n)���ضȡ��Դ늉���׃���������ܸ��_(d��)10%����ÿ���I(y��)ϵ�y(t��ng)���������Ĝضȷ���Ҫ�� ��������l�������׃��������ϵ�y(t��ng)���ܵ��S�ɷ������t��Ҫ�ڶ�N�����l����(zh��)�����c(di��n)����yԇ��Ŀ�����L���`�����ԣ�������У��(zh��n)ϵ��(sh��)�����@Щϵ��(sh��)����K��ɾ���D5����ʾ�ǘӡ��@�N��r�µ�У��(zh��n)����������׃�������а���һ�M���ڹ����l�������׃�����@Щ���������l��푑�(y��ng)���߸��N�����l���� �D5��У��(zh��n)��̖���� �Y(ji��)Փ �ڲ������ӋУ��(zh��n)�����^���������Ҫ���ǽ����Ѓrֵ������Ŀ��(bi��o)�����ڱ�����ָ����ӑՓ���L(f��ng)�U�^(q��)���_�l(f��)�̑�(y��ng)֪��У��(zh��n)�����S��ģ���߀���д�������ֵ�C(j��)���������KĿ��(bi��o)���_��Ԓ����(sh��)�H�ϣ��аl(f��)����Ŀ��(bi��o)���H�����ڹ����I(l��ng)����Ҫ���]���M(j��n)���L(f��ng)�U(�pʧ����)�������L(f��ng)�U(�_(d��)�����͑�Ҫ��)�Լ��ɱ��^���L(f��ng)�U(�Gʧ�Ј�)�ȡ��M�����ܵ�Ӱ��ǻ����ģ���߀Ҫ���]��(sh��)�F(xi��n)ԓ���ܲ�һֱ��У��(zh��n)�����Ͷ�Y�������@Щ�������ڹ��̎��������õľC�ϛQ�ߣ���?y��n)����������]�Ć��}��һ������Ć��}-�������cُ�I���P(gu��n)ϵ�� ᘌ��ɱ������ܵĸ����A(y��)�ځ��f��ͨ�^�c�F(xi��n)�ɵ����ý�Q����-��ADI��˾��ADIS16201ȫУ��(zh��n)���p�S����Ӌ/�ŃAӋ�M(j��n)�б��^����Ȼ���l(f��)�����аl(f��)һ������У��(zh��n)��ˇ��ð�����L(f��ng)�U�Ƿ�ֵ�ã���������������(n��i)��������ᘌ����N��r���ش��@�����}�� ���ߣ�Randy Carver �аl(f��)���̎� randy.carver@analog.com Mark Looney �Y�(y��ng)�ù��̎� mark.looney@analog.com Analog Devices |