|
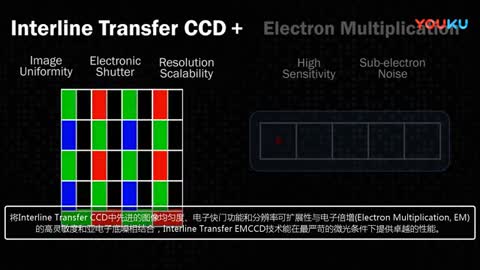
本文所要設計的驅動電路是機載CCD相機上的前端驅動電路。機載CCD相機能夠將拍攝的圖像以數字的形式采集、存儲和傳輸,并與地面實現實時通信,因此可以很好地克服傳統光學相機的缺點。隨著CCD器件的快速發展,CCD驅動時序的產生有很多種方法,比如可以采用數字集成電路、單片機、EPROM器件或可編程邏輯器件等來實現。本文采用CCD專用的數字集成芯片和單片機進行設計來實現CCD驅動電路。它的優點是結構設計簡單、設計周期短、電路可靠性強。而高速時序脈沖產生芯片的運用又克服了單片機晶振頻率低的限制,因此足以滿足高速大面陣CCD的驅動時序要求。 1 系統總體結構 CCD驅動電路系統框圖如圖1所示,它以微控制器P89LPC932作為系統總的控制單元,在其控制下,SAA8103與TDA9991共同為CCD芯片FTF4027M提供所需的驅動脈沖和偏置電壓,協調整個相機同步工作。CCD輸出的信號是帶有固定圖像噪聲和暗電流的模擬信號,需要運用光學黑補償箝位電路并通過相關雙采樣去除噪聲干擾,然后進行可在控增益放大和模/數轉換,這些工作由CCD專用的模擬處理芯片TDA9965來完成。輸出的12位數字信號送給DSP以便進行進一步的數字圖像處理。 2 FTF4027M的內部結構及驅動時序分析 FTF4027M是一款1100萬像素(4008×2672)的超大分辨率全幀CCD圖像傳感器。其內部結構如圖2所示。該款芯片在結構上分為三部分,中間最大的區域為光敏區,即光積分區域;上下兩部分為兩個輸出寄存器,將光積分生成的電荷水平轉移到四個角的輸出放大器,輸出放大器將光生電荷形成的電壓信號放大并轉移出CCD。該款芯片的最大特點是將光敏區生成的圖像分成W、X、Y、Z四個對稱的角限,每個象限的電荷可以以不同的方向轉移,通過四個輸出端同時輸出,有效地增加了幀速率,單端輸出的幀速率為2幀/秒,而四端同時輸出就可以達到7.5幀/秒。在本應用中,單端輸出就可以滿足系統設計要求,因此采用單端輸出方式,電荷轉移方向如圖中虛線所示,A1、A2、A3、A4為垂直驅動時鐘信號,C1、C2、C3為水平移動時鐘信號。 CCD的幀轉移時序圖如圖3所示。SSC為系統內部基準時鐘信號,用于校準整個CCD的時序;CR(Charge Reset)為CCD的電荷復位信號,相當于電子塊門信號;Trig-in是CCD的外部觸發信號,用于控制CCD光積分的起始和結束;VA-high是控制四相A時鐘的高低電平轉換的信號;TG是光敏區與輸出寄存器之間的隔柵,TG信號的相位和頻率與A1完全一致。整個幀時序分為三個階段,這三個階段是循環進行的。把空閑模式階段定義為第一階段,在CCD空閑模式下,A時鐘信號全部保持低電平。空閑模式后,CCD開始進入第二階段,即光積分階段,A1繼續保持低電平,A2、A3、A4上升為高電平。因為CCD中的每個像素都可以看作是由四個柵極(每個柵極上連接一相時鐘信號)“覆蓋”的,而且像素之間必須分離開,水平方向上可以通過溝道隔離像素。為了將像素與像素在垂直方向上隔離開,必須將四個柵極中的某一個柵極電壓變為0。 在本應用中,將A1保持低電平以起到像素隔離的作用而光生電荷則在保持高電平的A2、A3、A4的柵極下積聚起來,形成信號電荷包。光積分結束后進入第三階段,即幀轉移階段,而幀轉移又可以看成是垂直行轉移和水平像素轉移交替進行的,它們之間的交換轉換是通過SSC電平的高低轉換實現的。在SSC保持高電平時,光敏區里已經生成的光電荷在四相A時鐘信號的驅動下逐行地向下轉移到輸出寄存器的。如圖4所示,每轉移完一行,SSC變為低電平,則輸出寄存器就在三相C時鐘信號的驅動下將這一行逐個像素地向輸出放大器轉移。輸出放大器內有一個浮置擴散電容FD(Floating Diffusion Capacitance),它可以將接收到的電荷包轉換為電壓信號。 RG(Reset Gate)是通過復位管對FD進行復位的信號,復位后FD可以接收下一個電荷包。SG(Summing Gate)是在輸出柵OG之前的最后一個柵,SG信號和RG信號的相位與C3信號的相位相同。一行電荷包經過輸出放大器的轉換和放大后以電壓信號的形式從CCD輸出,接下來再進行下一行的垂直行轉移和水平像素轉移輸出,直到光敏面上的所有2684行電荷包輸出完畢為止。由此可見,整個一幀圖像是在A時鐘信號和C時鐘信號的交替驅動下從CCD輸出而完成幀轉移的。 3 系統設計 由于本系統中采用的芯片都是CCD專用的芯片,因此硬件電路設計相對簡單一些,主要工作是軟件設計。本系統內部的微控制單元為P89LPC932型單片機,它是一款高性能、低功耗、高速度的小封裝微控制器,內帶I2C控制器。SAA8103也是一個I2C器件,內部有一個寄存器,專門用來保存設定的CCD驅動脈沖和偏置電壓的工作參數燒寫到單片機的Flash程序存儲器中,然后將這些參數在系統上電后通過I2C總線傳輸到SAA8103的寄存器內,再通過三線串行總線為TDA9965和TDA9991進行設定和控制,從而讓CCD在最佳的狀態下與后續圖像處理和圖像傳輸單元協調工作。 3.1 CCD所需的一些偏置電壓 ①VNS:加到CCD的N型基底上的電壓,電壓范圍從22V到28V,主要用于控制CCD的高光行為(Antiblooming抗暈)。為了實現電荷復位功能,CR脈沖必須加到VNS上,這個電荷復位脈沖的主要功能是將CCD上已經積累好的光生電荷全部移除,這在CCD新的光積分循環開始時是必須的。 ②SFD:加到CCD的輸出放大器上的直流電壓。 ③RD:加到復位管(Reset Fet)上的直流電壓。 ④OG:連接SG和浮置擴散電容的輸出柵上所加的電壓。 ⑤VPS:加到P摻雜基底上的電壓。 3.2 CCD所需的驅動時序的設置 3.2.1 快門及光積分的控制時序 本款CCD屬于全幀CCD,光敏面占CCD面積的大部分,為了得到100%的無污染點圖像,必須加上機械快門。如圖3所示,機械快門的開啟由Trig-in信號完成。當Trig-in信號的上升沿到來時,觸發快門使之進行開啟動作,CCD準備進行光積分。在Trig-in信號上升沿之后,當基準時鐘信號SSC的第一個上升沿到來時產生一個脈沖信號CR,用于對CCD進行初始化,CR脈沖寬度等于SSC的一個周期,為190.6μs。在SSC的下一個上升沿到來時,產生CR下降沿,這時快門徹底打開,CCD正式進入光積分階段。當Trig-in信號的下降沿到來時,CCD光積分結束,同時觸發機械快門使之進行關閉動作,在一個SSC周期的時間之后,快門完成關閉,然后再在SSC的上升沿到來的開始進行幀轉移。因此機械快門的開啟和關閉的動作總是落后于控制信號,這樣就避免了在快門打開階段就進行光積分,導致有用信號的丟失,也避免了因快門未完全關閉就開始進行幀轉移而引起的圖像噪聲干擾。通過設置CR信號下降沿到Trig-in下降沿這段時間來控制光積分,也就控制了水平常說的電子快門速度。 3.2.2 垂直行轉移的驅動時序 該時序涉及A1、A2、A3、A4、TG,其頻率都為50kHz。SSC上升沿到來時標志著一次水平像素轉移的結束和一次垂直行轉移的開始,可通過控制四相A時鐘信號的高低電平轉換來完成。四相A時鐘信號要滿足嚴格的交迭原理,占空比為5:8,即五個單元的高電平和三個單元的低電平,所以相鄰時鐘信號之間的延遲為二個單元。A時鐘信號的高電平有兩個水平,分別用于CCD的不同工作狀態,垂直轉移狀態的高電平要保持在14V,而光積分和保持狀態高電平要保持在10V。TDA9991中集成了一個電平控制單元,可以完成對A時鐘信號的電平控制。而在電平像素轉換期間,A1必須繼續保持低電平,A2、A3、A4保持高電平,從而保證光敏面中的未輸出信號繼續保持在A2、A3、A4電極之下。 3.2.3水平像素轉移的驅動時序 該時序涉及C1、C2、C3、RG、SG,其頻率都為25MHz。SSC下降沿到來時標志著一次垂直行轉移的結束和一次水平像素轉移的開始,轉移原理和行轉移原理一樣,三相C時鐘信號要嚴格滿足三相交迭原理,占空比為3:6,也就是高低電平保持時間一樣。在電荷由光敏區向輸出寄存器轉移的過程中(見圖4),在SSC下降沿到來之前,C3應該保持低電平,使像素在輸出寄存器的隔離開來,而C1和C2應該保持高電平,使轉移下隔斷的電荷在這兩個電極之下積聚起來,為下一步的水平轉移輸出作準備。 4 實驗與討論 系統設計完成后,根據CCD的時序村注,經仿真調試可以產生出相應的驅動脈沖和偏置電壓。但是由于系統的后續圖像處理和傳輸部分還沒有設計好,所以無法進行圖像采集。該驅動電路的研制結果表明,采用現在芯片進行系統設計有它自身的好處,可以簡化設計,而且調試簡單、可擴展性也比較強。 |