|
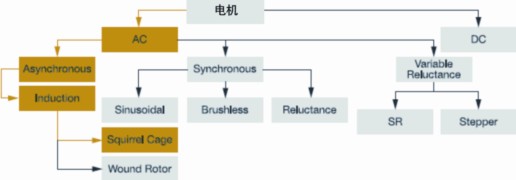
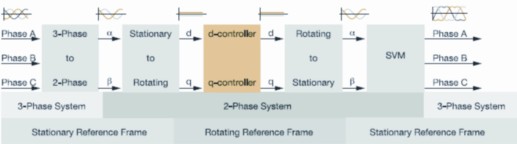
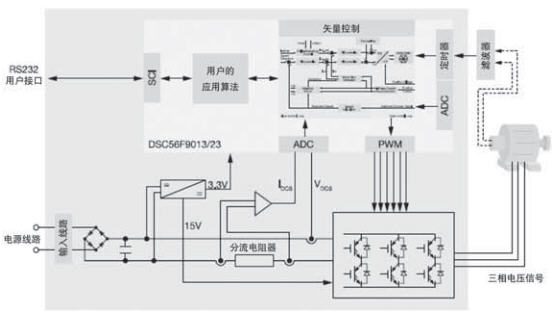
�������� ����������Ч���h(hu��n)�����}�������µ��ܺ�Ҏ(gu��)���ı�Ҫ�ԣ���(du��)��(ji��)�����I(y��)�ͼ���������������Ҳ���������@ЩҎ(gu��)����ʹ�˂�?y��u)�ϴ�C(j��)�����{(di��o)���s�C(j��)ϵ�y(t��ng)���L(f��ng)�C(j��)������_�l(f��)��(ji��)��늙C(j��)����(j��)��Ӌ(j��)��늄�(d��ng)�C(j��)���ĵ����ռ���I(y��)��(y��ng)�����ĵĿ������70%���ϣ���������о��f(xi��)��(hu��)�о��@ʾ�����^60%�Ĺ��I(y��)늙C(j��)�Ե����������~��ؓ(f��)�������\(y��n)�С� ���������Б�(y��ng)늙C(j��)(ACIM) �ڹ��I(y��)�����M(f��i)����е������кܶ�ԭ��(Ҋ�D1)�������dz�����(�����]��ˢ��)����������ɱ��ͣ����ҹ���(qi��ng)������Ҫ�S�o(h��)�����������a(ch��n)�ѽ�(j��ng)��һЩ�� �^����������Ę�(g��u)��O�ȃ�(y��u)�������^ȥ���@�늙C(j��)���\(y��n)��һֱ����Ҫ�ٶȿ��ƣ����Ҟ����_(d��)������ĽY(ji��)�����l������(d��ng)��ֹͣ���@һ�^��ʹ�õĴ�s50%��������� ���M(f��i)�� �����F(xi��n)�ڣ��˂�?c��)ڿ��]�ܶ��µĜp��ACIM��������ĵķ����������µ�늙C(j��)Ч�ʼ��g(sh��)������ģ�M늙C(j��)�·�Ĕ�(sh��)�ֿ��ƣ�ϵ�y(t��ng)�ɱ����Ŀ��Դ�͡����������˻����w˼����MC56F8013/23��(sh��)����̖(h��o)������(DSC)������AC�Б�(y��ng)늙C(j��)ʸ���(q��)��(d��ng)��Q�����������M(f��i)���I(y��)늙C(j��)�(q��)��(d��ng)������ý�(j��ng)��(j��)��Ч�Ľ�Q�����ă�(y��u)��(sh��)�� �����D1 늙C(j��)���[ �����D2 ʸ������׃�Q �������������Б�(y��ng)늙C(j��) ����ACIM��ּ�ڏ����ཻ���Դ���\(y��n)�е����D(zhu��n)늙C(j��)��ÿ��(g��)���ӵă�(n��i)�����O(sh��)�еIJ�۶�����һ��(g��)�����@�M��ÿ��(g��)�@�M�е�����M(j��n)�з��䣬�@�Ӷ����@�M�� ��������ښ�϶�����O(sh��)�܇��a(ch��n)��һ��(g��)�������������ֲ��Ĵ�ͨ�ܶȡ���(d��ng)�r(sh��)�g�����������ֲ���������120�Ƚ��e(cu��)��������λ�е�����(g��)�������(j��ng)����(g��)��(du��)�Q���õ��@�M �r(sh��)���͕�(hu��)�a(ch��n)��������϶�@�M��ͨ�ܶȣ�����Ҳ�����������ֲ��ښ�϶�܇������ஔ(d��ng)�ڶ���������l�ʵĽ��ٶ����D(zhu��n)�� �����Ҋ�ĸБ�(y��ng)늙C(j��)�����һ��(g��)��\�D(zhu��n)�ӣ����У��X��(d��o)�����X�l�T���D(zhu��n)�����O(sh��)�IJ���С��D(zhu��n)�ӵăɶ˾�ʹ���T�X�˭h(hu��n)�γ��X��(d��o)�����X�l��·���T�X�˭h(hu��n)Ҳ�� �����L(f��ng)�C(j��)����?y��n)����������ֲ���ͨ�ܶȲ��ɶ��ӄ�(l��)��������^�D(zhu��n)�ӌ�(d��o)���a(ch��n)���������ڌ�(d��o)���Юa(ch��n)��늉�����K�a(ch��n)����·�D(zhu��n)�ӗl�е����������ֲ��������?y��n)��@Щ��·�X �l���е����������ֻҪ���ͨ���Ľ��ٶȺ̓ɘO�D(zhu��n)�ӵęC(j��)е���ٶ�֮�g������(du��)�^С�Ľ��ٶȁ����ɱ�Ҫ���D(zhu��n)�����������(du��)���ٶȽ��������ٶȡ����������ֲ��Ě� ϶��ͨ�ܶȺБ�(y��ng)�D(zhu��n)������g�Ľ��������D(zhu��n)���ϵ�Ť�ء� ����AC�Б�(y��ng)늙C(j��)��ʸ������ �������ˌ�(sh��)�F(xi��n)����AC�Б�(y��ng)늙C(j��)�еĿ�׃�ٶ��\(y��n)�У���횞�늙C(j��)�ṩ��׃늉��Ϳ�׃�l�ʡ��F(xi��n)�������׃�ٶ��(q��)��(d��ng)(VSD)�����Д�(sh��)�ֿ��Ƶ��_�P(gu��n)��׃���� ���ԘO��ؽ���ϵ�y(t��ng)�����ġ�ʹ�ÿ�׃�ٶ��(q��)��(d��ng)���Թ�(ji��)ʡ���60%��������YԴ�����ʿ�����������ı����܉�?q��)��F(xi��n)��ǰ�����܌�(sh��)�F(xi��n)�Ĺ��ܡ���׃�ٶ��(q��)��(d��ng)�Ĺ��� ������늱��䉺�s�C(j��)�О�0.2~0.4kW����ϴ�C(j��)�О�0.8~1kW����סլ��������(w��)��늚��(q��)��(d��ng)��(�������סլ����ˮ�͟�ˮ�á����^���е���ˮ�� ����)��3~100kW�� ���������㷨���Է֞�ɴ����һ��ǘ�(bi��o)�����ƣ��㶨늉�/�l�ʿ����Ƿdz����еĿ��Ʒ�������һ���ʸ����ň��������(FOC)��ʸ�����Ʒ����܉��ṩ�Ș�(bi��o)�����Ƹ��ߵ��(q��)��(d��ng)���ܡ�FOC�ă�(y��u)��(sh��)��������Ч�ʡ���ȫŤ�ؿ��ơ���ͨ��Ť�ؿ��Ʒ��x����(d��ng)���W(xu��)���M(j��n)�ȡ� ����FOC�㷨�Ļ��������nj���������ֽ�����ɴ�ͨ�IJ��ֺ�����Ť�صIJ��֡��ɂ�(g��)���ֿ����ڷֽ��քe���ơ��@�ӣ�늙C(j��)�������ĽY(ji��)��(g��u)���c�քe�����DC늙C(j��)�ĽY(ji��)��(g��u)һ�Ӻ��Ρ��D2�@ʾ��AC�Б�(y��ng)늙C(j��)��ʸ�����ƵĻ����Y(ji��)��(g��u)�� ����Ҫ��(zh��)��ʸ�����ƣ���횲�ȡ�����@Щ���E��
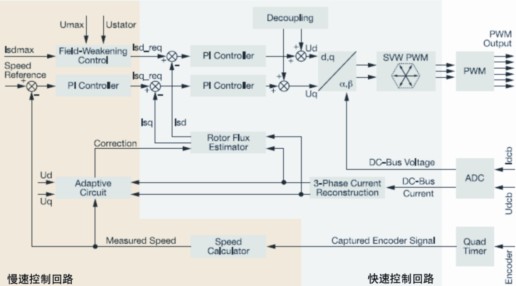
����Ҫ������ֽ�����ɴ�ͨ�IJ��ֺ�����Ť�صIJ���(isd��isq)���҂���Ҫ֪��늙C(j��)��ͨ��λ�á��@��Ҫ�c�D(zhu��n)���B�ӵ��ٶȻ�λ�����������М�(zh��n)�_���ٶ���Ϣ���������a���������������ʸ�������(q��)��(d��ng)��λ�Â���(d��o)��ʹ�á��ڳɱ����еđ�(y��ng)����(��ϴ�C(j��))���y�ٰl(f��)늙C(j��)���V�����á�Ȼ������Щ��(y��ng)���У�������Ҫʹ���ٶ�/λ�Â�������Ŀ�IJ�����ֱ�Ӝy���ٶ�/λ�ã����Dz���ijЩ�g�ӷ����������D(zhu��n)��λ�á���Щ�]�в����ٶȂ��������㷨���Q�顰�o���������ơ��� ����ʸ�������㷨���� �����ь�(sh��)ʩ�Ŀ����㷨�ĸ�����DՈ(q��ng)Ҋ�D3���c��������ʸ�����Ƶķ���һ�ӣ����܉�քe���ƸБ�(y��ng)늙C(j��)�Ą�(l��)�ź�Ť�ء����Ƶ�Ŀ���Ǟ����{(di��o)��(ji��)늙C(j��)�ٶȣ��� ������ֵ�ɸ�(j��)�����M(j��n)���O(sh��)�á�ԓ�㷨�ڃɗl���ƻ�·�Ќ�(sh��)ʩ�����ك�(n��i)�����ƻ�·��(sh��)ʩ����125 ��s���ڣ������ⲿ���ƻ�·�Č�(sh��)ʩ����1�������ڡ� �������ˌ�(sh��)�F(xi��n)�Б�(y��ng)늙C(j��)���ƣ�ԓ�㷨ʹ��һ�M������̖(h��o)������������̖(h��o)��DC����늉������ඨ������������Ǐ�DC���������늙C(j��)�ٶ��ؘ�(g��u)���������ˌ�(sh��)�F(xi��n)���_���������ƽY(ji��)��(g��u)Ҫ��늙C(j��)�S�����ٶȂ����������ṩ�㷨����r�£�ʹ���������a���� �����D3 �����㷨��D �������ٿ��ƻ�·��(sh��)ʩ�ɂ�(g��)��(d��)��������ƻ�·��������ֱ�S�������S���(isd��isq)PI��������ֱ�S���(isd)���ڿ����D(zhu��n)�Ӵ�ͨ�������S� ��(isq)��(du��)��(y��ng)늙C(j��)Ť�ء����PI��������ݔ����ȥź����늉�������(y��ng)d��q�S�����M(j��n)�ЅR�����@���҂��ͫ@���ˑ�(y��ng)����늙C(j��)�Ķ���늉���������gʸ�������� ���ƻ�·��(zh��)�����б�Ҫ�΄�(w��)��֧�ֶ���������ֵĪ�(d��)�����ơ��@Щ����ģ�K������
�������ٿ��ƻ�·��(zh��)���ٶȺʹň������������͵̓�(y��u)�ȼ�(j��)�����΄�(w��)��PI�ٶȿ�����ݔ�������ɶ�������������S����(isq)��Ť���O(sh��)�Å��������ɶ��� �����ֱ�S����(isd)�Ĵ�ͨ�����ɴň������������O(sh��)�á����m��(y��ng)�·�m���D(zhu��n)�ӕr(sh��)�g����������ȵp���D(zhu��n)�Ӵ�ͨλ�ù�����e(cu��)�`�� ����ϵ�y(t��ng)���� �����w˼����MC56F80xxϵ�зdz��m�ϔ�(sh��)��늙C(j��)���ƣ�����һ��оƬ�ϼ�DSP��Ӌ(j��)��������MCU��������������һ���� ����MC56F80xxϵ�гɆT�ṩ�������O(sh��)�K��
�������І���·������������ACIMʸ�����ƴ���������`���PWM ģ�K������ADC�����΄�(w��)���r(sh��)��ģ�K��PWM�������`���Ԍ�(sh��)�F(xi��n)����Ч������늙C(j��)���ơ�PWMģ�K�܉������댦(du��)�R���������ɲ���(du��)�QPWMռ�ձȡ��҂��܉�� �����棬��(sh��)�F(xi��n)�P(gu��n)�I�_�P(gu��n)ģʽ����������ؘ�(g��u)��PWM���dSYNC��̖(h��o)���ɣ��ṩ�c����ģ�K(���΄�(w��)���r(sh��)����ADC)��ͬ����ԓ��(y��ng)����ͬ��ģʽ��ʹ��ADC �K�����cPWM�}�_ͬ�����@�N�����܉���Ҫ��ĕr(sh��)�g��(n��i)��ͬ���D(zhu��n)�QDC���������늉������ģ�Mֵ��ADC�D(zhu��n)�Q��PWMֱ���|�l(f��)���o��DSC��(n��i)�����^ԓ�� �����Ķ���(sh��)�F(xi��n)���A(y��)�y�ġ�����(du��)�㶨�Ķ��r(sh��)��
�������΄�(w��)���r(sh��)����һ��(g��)�O���`���ģ�K���ṩ�c�r(sh��)�g�¼����P(gu��n)�����б�Ҫ����(w��)��ԓ��(y��ng)��ʹ���ėl�ŵ���
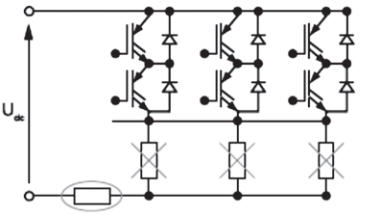
�������m��(y��ng)�]·�D(zhu��n)�Ӵ�ͨ��������(qi��ng)�������ܣ����ϵ�y(t��ng)�Ŀ��w��(w��n)���ԡ�ͨ�^�@�N��ʽ������(sh��)Ư�������Ծʹ�͡�ԓ�㷨��(sh��)ʩ����·���������������(g��)����������p��һ��(g��)������ȵp����ϵ�y(t��ng)�ɱ��� ������һ��(g��)��(y��u)��(sh��)�Ǹ��_(d��)20,000 rpm�Ĵ�늙C(j��)�\(y��n)���ٶȡ��e�����f��ϴ�C(j��)����Ҫ�@�N���ٶȡ�ˮƽϴ�C(j��)�У�늙C(j��)�͝LͲ�ٶȵı��ʴ�s��10:1�����Ҫ�_(d��)��2,000rpm�ĝLͲ �ٶȣ�늙C(j��)�����20,000rpm�ٶ��\(y��n)�С�ϴ�C(j��)������Б�(y��ng)늙C(j��)�Ę�(bi��o)�Q�ٶ��h(yu��n)�h(yu��n)����20,000rpm (ͨ����6,000rpm)��ʹ�ôň������㷨�����_(d��)�������ٶȣ��@�܉�늙C(j��)���^��(bi��o)�Q�ٶȣ�ͬ�r(sh��)��ͨ�S���ژ�(bi��o)�Q늙C(j��)늉���ͨ�^�ň������㷨��ʹ��һ��(g��)��(bi��o) �Q�ٶ��^�͵��\(y��n)���ٶ���߿��_(d��)20,000rpm��늙C(j��)�����Դ��(ji��)ʡ�ɱ�����Դ�� ������������ؘ�(g��u) ����ʸ�������㷨��Ҫ����늙C(j��)������С���(bi��o)��(zh��n)������ֱ��ͨ�^���������������Ч��(y��ng)���������������������Ч��(y��ng)������ֱ���B�ӵ����d�_�P(gu��n)��늙C(j��)�g�������늙C(j��)��λ����Ҫ�p������������Ĕ�(sh��)�����O(sh��)Ӌ(j��)���ɱ������Æ�DC�·���������������ʽ�y�����ඨ�����(Ҋ�D5)�� ����DC�·����}�_���՜�(zh��n)�_���r(sh��)�g���M(j��n)�вɘӡ�����������ϵ�늉���ʹ�������(q��)��(d��ng)��(n��i)���\(y��n)���Ŵ����Ŵ����1.65V���ϳ�늉�ʹ��ADC�M(j��n)���D(zhu��n)�Q��
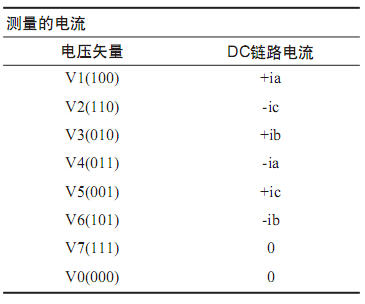
�������ӵ�����������ؘ�(g��u)�����_�P(gu��n)�Č�(sh��)�H�M�ϡ�ADC�y��PWMѭ�h(hu��n)�Ļ��(d��ng)ʸ���^���е�DC�·�������(d��ng)��(y��ng)��늉�ʸ��V1�r(sh��)���������܉������A�@
�M����ͨ�^B��C���@�M����ؓ(f��)܉����(d��ng)��(y��ng)��늉�ʸ��V2�r(sh��)������ؓ(f��)܉��DC�·�������T������������ÿ��(g��)�ȅ^(q��)�У��ṩ��������y��ֵ��Ҳ����Ӌ(j��)�������
��ֵ����?y��n)�����(g��)�@�M����Ŀ��͞��㡣늉�ʸ���M�Ϻ�����(y��ng)�ؘ�(g��u)��늙C(j��)������@ʾ�ڱ�1�С�
�����L(f��ng)�C(j��)��Դ�ɱ�����ʾ�� ����ˮ�ú��L(f��ng)�C(j��)ϵ�y(t��ng)ռ�ИI(y��)������늙C(j��)��(y��ng)�õĽ�40%���L(f��ng)�C(j��)��ݔ�빦���c���������������ȡ����磬���100%�Ě�����Ҫȫ���ʣ�75%�Ě�����Փ�� ��Ҫ (0.75)3=ȫ���ʵ�42%���M���@�����o����l���µ���Փ��(ji��)ʡ��(sh��)�֣�����ʹ���ڌ�(sh��)�H��(y��ng)���У�Ҳ���Ԍ�(sh��)�F(xi��n)�����Դ��(ji��)ʡ��VSDͨ�������ڹ�(ji��)ʡ�x�� �L(f��ng)�C(j��)��ˮ�õ���Դ��������Ƒ�(y��ng)�õĹ�(ji��)ʡ�r(sh��)��ʹ���L(f��ng)�C(j��)���ɕ�(hu��)�dz����ã�ԓ�����漰���՚�(Һ�w)����(d��ng)��ݔ�빦�ʺ�늙C(j��)�ٶȡ� �����L(f��ng)�C(j��)���ɵ�ʽ ����Q2/Q1=N2/N1 ����P2/P1=(N2/N1)2 ����HP2/HP1=(N2/N1)3 �������У�Q1��Q2����ʼ���µ��w�e����(l/s) ����P1��P2����ʼ���µĉ������^(kPa) ����N1��N2����ʼ���µ��L(f��ng)�C(j��)�ٶ�(rpm) ����HP1��HP2����ʼ���µ��L(f��ng)�C(j��)ݔ�빦��(kW) ��������(y��ng)���ЃɷN�����l������sˮϵ�y(t��ng)�ļ���ˮ�S���L(f��ng)�C(j��)���ɑ�(y��ng)�õ�������ӡ�ϵ�y(t��ng)����ӂ���(d��ng)�����ƣ���ӂ���(d��ng)������ϵ�y(t��ng)Ҫ��(ji��)���y����ˮ������(d��ng)��(ji��)�� �y��ȫ���_�r(sh��)��ÿ��������80��(l/s)�����y���Ĺ��Ğ�20 kW����(d��ng)ʹ�ù�(ji��)���y�����ٽ���65 l/s �r(sh��)���y���Ĺ��Ğ�18 kW��ϵ�y(t��ng)ÿ���\(y��n)��8,760С�r(sh��)����(ji��)��������r�Ͳ���(ji��)��������r��ռ60%��40%��ͨ�^���bVSD����(ji��)ʡ����������Ӌ(j��)�����£� ����HP2/HP1=(N2/N1)3 ����As HP2/HP1=(Q2/Q1)3 ����HP2/20[kW]=(65 [l/s]/80[l/s])3 ����HP2=(65[l/s]/80[l/s])3*20[kW] ����HP2=10.77kW ����ԓ��ʽ�@ʾ����ϵ�y(t��ng)����(ji��)�����Ƶ�60%�ĕr(sh��)�g���(ji��)ʡ��s���ڣ� ����8760С�r(sh��)/��* .60 * (18 kW-10.77kW) =38,001kWh ������(d��ng)���F(xi��n)������r�r(sh��)����(y��ng)ʹ��VSD��
�����Y(ji��)Փ ���������w˼����MC56F80xx DSC�Ľ�Q�����Ǹ��N���I(y��)�����M(f��i)늙C(j��)���Ƒ�(y��ng)�õĽ�(j��ng)��(j��)��Ч���O(sh��)Ӌ(j��)��DSC�܉�ȫ����ƽ���늸���(y��ng)늙C(j��)�������ʼ�K�����Ч���\(y��n)�С��M��늙C(j��)��������(du��)��(y��ng)̎�� �����cȫ���\(y��n)�е�늙C(j��)�����M(f��i)��ȣ���׃�ٶ��(q��)��(d��ng)���Թ�(ji��)ʡ������Դ���@�p����늙C(j��)�ĉ����͏��������L��늙C(j��)��늚�͙C(j��)е�������S����Դ�r(ji��)����ϝq���w˼ ����DSC��늄�(d��ng)�C(j��)����Դ��(ji��)ʡ�Ƴ���һ�������x���� ���������īI(xi��n)�� ����[1] AN3476 - Washing Machine Three-Phase AC-Induction Direct Vector Control , rev #1, 08/16/2007 ����[2] RDDSCACIMVC - 3-Phase AC Induction Vector Control Drive with Single Shunt Current Sensing, (DRM092, Rev#0, 07/24/2007) ����[3] Motors and Variable Speed Drives, www.sedo.energy.wa.gov.au ����[4] MC56F80xx Freescale DSC - www.freescale.com ����[5] 3-Pahse AC Induction Motor - www.freescale.com/motorcontrol |