|
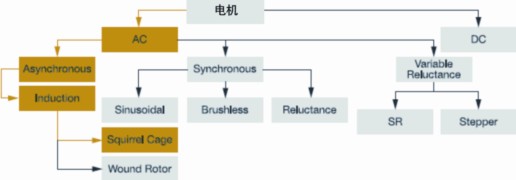
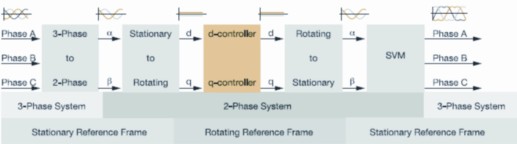
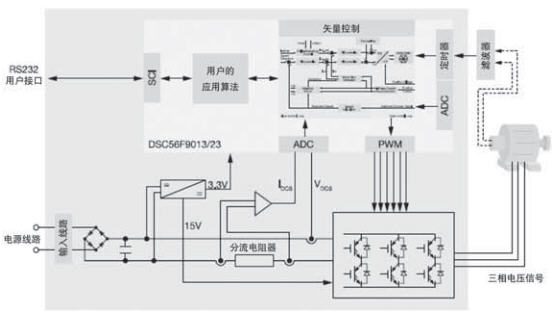
簡介 由于能效、環境問題及遵守新的能耗規定的必要性,對節能型工業和家用電器的需求最近也在攀升。這些規定迫使人們為洗衣機、空調壓縮機系統和風機等電器開發節能電機。據估計,電動機消耗的電力占工業應用消耗的總電力的70%以上,美國電力研究協會研究顯示,超過60%的工業電機以低于它們的額定負荷容量運行。 交流感應電機(ACIM) 在工業和消費電子中的流行有很多原因(見圖1)。它們非常簡便(它們沒有刷子),不但制造成本低,而且功能強大,幾乎不需要維護。它們的生產已經有一些年 頭,因此它們的構造極度優化。在過去,這類電機的運行一直不需要速度控制,而且為了達到理想的結果,頻繁啟動和停止。這一過程使用的大約50%的電力都被 浪費。 現在,人們在考慮很多新的減少ACIM的電力消耗的方法,包括新的電機效率技術。利用模擬電機電路的數字控制,系統成本和功耗可以大大降低。本文描述了基于飛思卡爾MC56F8013/23數字信號控制器(DSC)的三相AC感應電機矢量驅動解決方案,為消費和工業電機驅動充分利用經濟高效的解決方案的優勢。 圖1 電機總覽 圖2 矢量控制變換 三相交流感應電機 ACIM是旨在從三相交流電源中運行的旋轉電機。每個定子的內部外設中的插槽都包含一個三相繞組。每個繞組中的順序都進行分配,這樣定子繞組中 的電流就在氣隙的外設周圍產生一個近似正弦曲線分布的磁通密度。當時間呈正弦曲線分布、但又以120度交錯放置在相位中的三個電流流經三個對稱放置的繞組 時,就會產生放射狀氣隙繞組磁通密度,它們也呈正弦曲線分布在氣隙周圍,以相當于定子電流角頻率的角速度旋轉。 最常見的感應電機類型有一個鼠籠轉子,其中,鋁導線或鋁條鑄入轉子外設的插槽中。轉子的兩端均使用鑄鋁端環形成鋁導線或鋁條短路,鑄鋁端環也可 用作風機。因為正弦曲線分布磁通密度波由定子勵磁電流掠過轉子導線產生,所以在導線中產生電壓,最終產生短路轉子條中的正弦曲線分布電流。因為這些短路鋁 條具有低電阻,所以只要求磁通波的角速度和兩極轉子的機械角速度之間的相對較小的角速度來生成必要的轉子電流。相對角速度叫作滑流速度。正弦曲線分布的氣 隙磁通密度和感應轉子電流間的交互生成轉子上的扭矩。 AC感應電機的矢量控制 為了實現三相AC感應電機中的可變速度運行,必須為電機提供可變電壓和可變頻率。現代三相可變速度驅動(VSD)都配有數字控制的開關逆變器, 可以極大地降低系統總功耗。使用可變速度驅動可以節省最多60%的電力,資源利用率可以提高三到四倍,能夠實現以前不可能實現的功能。可變速度驅動的功率 范圍在電冰箱壓縮機中為0.2~0.4kW,在洗衣機中為0.8~1kW,在住宅和公共服務的電氣驅動中(例如多層住宅的冷水和熱水泵、中繼線中的冷水管 道等)為3~100kW。 控制算法可以分為兩大類。第一類是標量控制,恒定電壓/頻率控制是非常流行的控制方法。另一類是矢量或磁場定向控制(FOC),矢量控制方法能夠提供比標量控制更高的驅動性能。FOC的優勢包括更高效率、完全扭矩控制、磁通和扭矩控制分離、動力學改進等。 FOC算法的基本理念是將定子電流分解為生成磁通的部分和生成扭矩的部分。兩個部分可以在分解后分別控制。這樣,電機控制器的結構就與分別激振的DC電機的結構一樣簡單。圖2顯示了AC感應電機的矢量控制的基本結構。 要執行矢量控制,必須采取以下這些步驟:
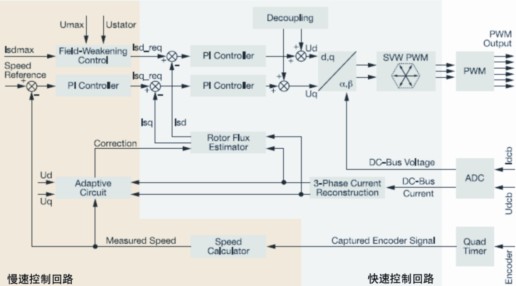
要把電流分解為生成磁通的部分和生成扭矩的部分(isd、isq),我們需要知道電機磁通的位置。這需要與轉子連接的速度或位置傳感器傳感準確的速度信息。增量編碼器或解析器被作為矢量控制驅動的位置傳導器使用。在成本敏感的應用中(如洗衣機),測速發電機被廣泛采用。然而在有些應用中,并不需要使用速度/位置傳感器。目的并不是直接測量速度/位置,而是采用某些間接方法,估算轉子位置。那些沒有采用速度傳感器的算法被稱為“無傳感器控制”。 矢量控制算法描述 已實施的控制算法的概述框圖請見圖3。與其他面向矢量控制的方法一樣,它能夠分別控制感應電機的勵磁和扭矩。控制的目的是為了調節電機速度,速 度命令值由高級控制進行設置。該算法在兩條控制回路中實施,快速內部控制回路實施采用125 μs周期,慢速外部控制回路的實施采用1毫秒周期。 為了實現感應電機控制,該算法使用一組饋入信號。基本饋入信號是DC總線電壓、三相定子電流,它們是從DC總線電流和電機速度重構而來。為了實現正確操作,控制結構要求電機軸上有速度傳感器。在提供算法的情況下,使用增量編碼器。 圖3 控制算法框圖 快速控制回路實施兩個獨立電流控制回路,它們是直軸和正交軸電流(isd、isq)PI控制器。直軸電流(isd)用于控制轉子磁通,正交軸電 流(isq)對應電機扭矩。電流PI控制器的輸出用去藕定子電壓的相應d和q軸部分進行匯總,這樣我們就獲得了應用于電機的定子電壓的理想空間矢量。快速 控制回路執行所有必要任務,支持定子電流部分的獨立控制。這些功能模塊包括:
慢速控制回路執行速度和磁場弱化控制器和低優先級控制任務。PI速度控制器輸出為生成定子電流的正交軸分量(isq)的扭矩設置參考。生成定子 電流的直軸分量(isd)的磁通參考由磁場弱化控制器設置。自適應電路糾正轉子時間常量,最大限度地減少轉子磁通位置估算的錯誤。 系統概念 飛思卡爾MC56F80xx系列非常適合數字電機控制,它在一粒芯片上集DSP的計算能力和MCU的控制器功能于一身。 MC56F80xx系列成員提供下列外設塊:
帶有單旁路傳感器的三相ACIM矢量控制大大受益于靈活的PWM 模塊、快速ADC和四任務定時器模塊。PWM的配置靈活性實現了有效的三相電機控制。PWM模塊能夠在中央對齊配置中生成不對稱PWM占空比。我們能夠從 中受益,實現關鍵開關模式的三相電流重構。PWM重載SYNC信號生成,提供與其他模塊(四任務定時器、ADC)的同步。該應用在同步模式中使用ADC 塊,并與PWM脈沖同步。這種配置能夠在要求的時間內,同步轉換DC總線電流和電壓所需的模擬值。ADC轉換由PWM直接觸發,無需DSC內核中繼該事 件,從而實現可預測的、相對恒定的定時。
四任務定時器是一個極度靈活的模塊,提供與時間事件有關的所有必要服務。該應用使用四條信道:
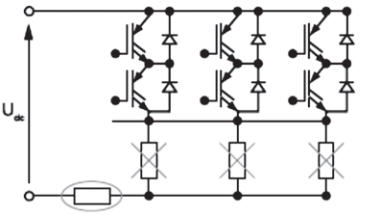
自適應閉路轉子磁通估算增強控制性能,提高系統的總體穩健性。通過這種方式,參數漂移敏感性就大大降低。該算法實施單旁路電流傳感,將三個電流傳感器減為一個,最大限度地減少了系統成本。 另一個優勢是高達20,000 rpm的大范圍電機運行速度。舉例來說,洗衣機就需要這種高速度。水平洗衣機中,電機和滾筒速度的比率大約為10:1,因此要達到2,000rpm的滾筒 速度,電機必須以20,000rpm速度運行。洗衣機的三相感應電機的標稱速度遠遠低于20,000rpm (通常為6,000rpm)。使用磁場弱化算法可以達到更高速度,這能夠讓電機超過標稱速度,同時磁通維持在標稱電機電壓。通過磁場弱化算法,使用一個標 稱速度較低但運行速度最高可達20,000rpm的電機,可以大大節省成本和能源。 三相電流重構 矢量控制算法需要三相電機電流傳感。標準方法是直接通過電流互感器或霍爾效應傳感器傳感相電流,霍爾效應傳感器直接連接到承載開關和電機間的電流的電機相位線。要減少電流傳感器的數量和設計總成本,采用單DC鏈路電流分流傳感器方式測量三相定子電流(見圖5)。 DC鏈路電流脈沖按照準確定時間隔進行采樣。分流電阻器上的電壓降使用三相驅動內的運算放大器放大,并提高1.65V。合成電壓使用ADC進行轉換。
定子的三相電流的重構基于開關的實際組合。ADC測量PWM循環的活動矢量過程中的DC鏈路電流。當應用電壓矢量V1時,電流從正軌流到相A繞
組,再通過B和C相繞組返回負軌。當應用電壓矢量V2時,返回負軌的DC鏈路電流等于T相電流,因此在每個扇區中,提供兩相電流測量值。也可能計算三相電
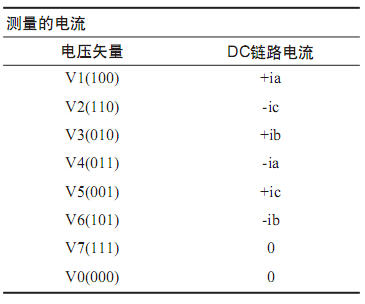
流值,因為三個繞組電流的總和為零。電壓矢量組合和相應重構的電機相電流顯示在表1中。
風機能源成本估算示例 水泵和風機系統占行業中所有電機應用的近40%。風機的輸入功率與氣流的立方成正比。例如,如果100%的氣流需要全功率,75%的氣流理論上 需要 (0.75)3=全功率的42%。盡管這是零靜電噪聲條件下的理論節省數字,但即使是在實際應用中,也可以實現巨大的能源節省。VSD通常多用于節省離心 風機和水泵的能源。估算類似應用的節省時,使用風機定律會非常有用,該定律涉及到空氣(液體)流動、輸入功率和電機速度。 風機定律等式 Q2/Q1=N2/N1 P2/P1=(N2/N1)2 HP2/HP1=(N2/N1)3 其中:Q1,Q2—初始和新的體積流量(l/s) P1,P2—初始和新的壓力或壓頭(kPa) N1,N2—初始和新的風機速度(rpm) HP1,HP2—初始和新的風機輸入功率(kW) 供應具有兩種流量條件的冷卻水系統的集中水廠是風機定律應用的最好例子。系統由電子傳動器控制,電子傳動器按照系統要求節流閥控制水流。當節流 閥完全打開時,每秒流量為80升(l/s),而測量的功耗為20 kW。當使用節流閥把流速降到65 l/s 時,測量的功耗為18 kW。系統每年運行8,760小時,節流控制情況和不節流控制情況各占60%和40%。通過安裝VSD,節省的能量可以計算如下: HP2/HP1=(N2/N1)3 As HP2/HP1=(Q2/Q1)3 HP2/20[kW]=(65 [l/s]/80[l/s])3 HP2=(65[l/s]/80[l/s])3*20[kW] HP2=10.77kW 該算式顯示,在系統被節流控制的60%的時間里,節省大約等于: 8760小時/年* .60 * (18 kW-10.77kW) =38,001kWh 當出現以下情況時,應使用VSD:
結論 基于飛思卡爾MC56F80xx DSC的解決方案是各種工業和消費電機控制應用的經濟高效的設計。DSC能夠全面控制交流電感應電機,因此它始終以最佳效率運行。盡管電機的容量對應處理 需求,但與全速運行的電機的浪費相比,可變速度驅動可以節省大量能源。這減少了電機的壓力和張力,延長了電機的電氣和機械壽命。隨著能源價格的上漲,飛思 卡爾DSC為電動機的能源節省推出了一款智能選件。 參考文獻: [1] AN3476 - Washing Machine Three-Phase AC-Induction Direct Vector Control , rev #1, 08/16/2007 [2] RDDSCACIMVC - 3-Phase AC Induction Vector Control Drive with Single Shunt Current Sensing, (DRM092, Rev#0, 07/24/2007) [3] Motors and Variable Speed Drives, www.sedo.energy.wa.gov.au [4] MC56F80xx Freescale DSC - www.freescale.com [5] 3-Pahse AC Induction Motor - www.freescale.com/motorcontrol |