|
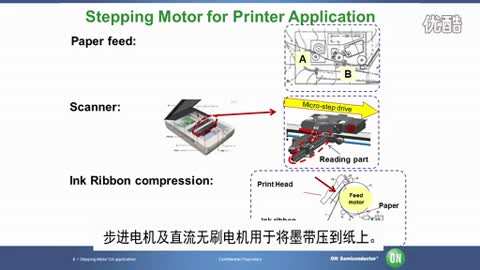
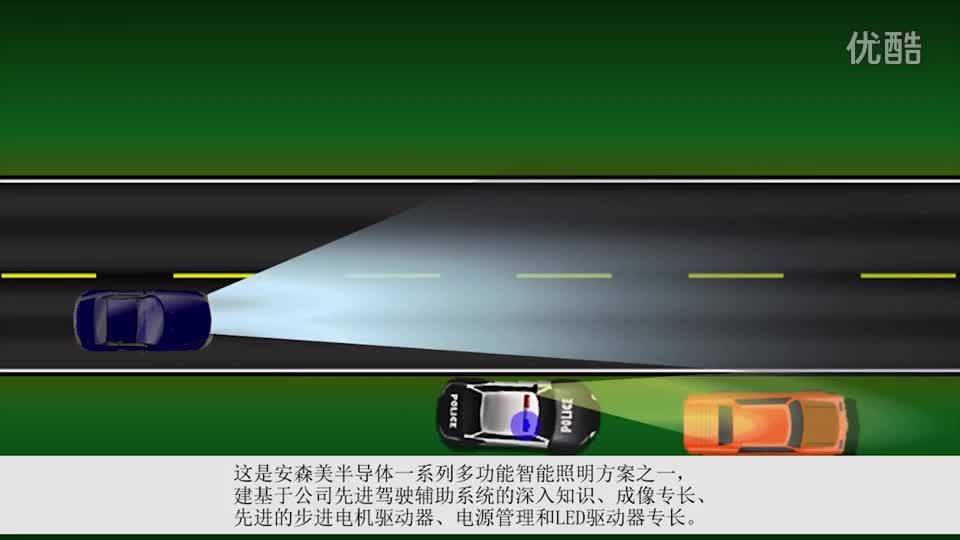
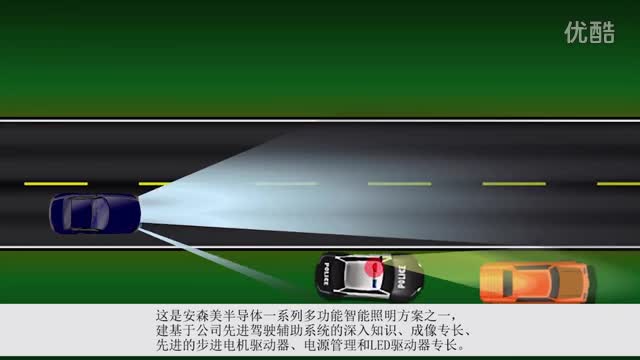
摘要:本文針對汽車前大燈隨動轉向系統控制,提出基于飛思卡爾S12ZVL的混合集成芯片解決方案。本文詳細描述汽車前大燈隨動轉向系統的軟硬件設計框圖,同時介紹基于飛思卡爾的LIN驅動包的控制器LIN通信實現。 0 引言 汽車前照燈是汽車上重要的安全部件。當前大部分汽車頭燈的照射角度是固定的,當汽車在彎道上行駛時,由于光束不能偏轉,光照視野不能滿足駕駛要求。所以當在夜間行駛轉彎的時候,會因為行駛角度問題出現一定的“盲區”,這會在一定程度上影響行車的安全。在照明光線固定的情況下,這個盲區是不可避免的,所以“AFS燈光隨動轉向系統”就應運而生了。它能根據汽車的轉向信號以及車速信號等,自動調節車燈光束的方向,確保車輛在轉彎時無延遲的對準即將進入駕駛員視野的路面,為駕駛員提供最優的照明效果,確保夜間轉彎行車的安全,提高了汽車的主動安全性。 如圖1所示,AFS系統以車輛在轉彎時方向盤的轉角以及汽車瞬時車速作為控制參數輸入,根據設計的控制算法得到與車速和方向盤轉角相適應的車燈轉角,并以之作為目標角度來對汽車前大燈進行隨動調節。同時通過計算車身前后橋傳感器信號,自動調節大燈高度位置,以適應不同道路坡度的照明需求。本文提出了基于S12ZVL的AFS執行控制器設計,從而實現與AFS主控模塊之間的LIN通信,并驅動步進電機轉動HID燈。 圖1 AFS系統效果圖 1 S12ZVL特點 S12ZVL系列是S12 MagniV混合信號微控制器組合的一部分,提供智能、優化集成的高電壓組件。此新系列基于LL18UHV技術,可在單一芯片上結合高度可靠的180納米非易失性存儲器和高電壓模擬組件,這些高電壓模擬組件能夠承受負載突降時汽車環境的嚴苛要求。S12ZVL產品系統集成了一個LIN物理層、受ESD保護的12V輸入引腳(能夠進行ADC測量)以及在3.5V至40V之間操作的汽車穩壓器(為霍爾傳感器或RGB LED等片上和片外功能提供穩定的電源)。S12ZVL系列包括可擴展和引腳兼容的MCU,提供廣泛的內存和封裝選件。它重新利用最新推出的S12Z內核、IP和工具,輕松從現有的S12 16位產品進行遷移。此外,S12ZVL MCU集成了一些主要特性,包括所有內存(閃存、EEPROM和RAM)上的ECC功能和精確到1.3%的片上振蕩器,這可消除外部晶體振蕩器或共振器對LIN通信的要求,其結構框圖如圖2所示。 同時S12ZVL系列包括屬于飛思卡爾Safe Assure功能安全保障計劃的第一款16位MCU,旨在符合ISO 26262(ASIL A)要求的功能安全標準。 圖2 S12ZVL系列結構框圖 2 AFS執行控制器設計 AFS執行機構是由一系列的電機和光學機構組成。一般有投射式前照燈,對前照燈垂直角度進行調整的調高電機,對前照燈水平角度進行調整的旋轉電機,對基本光型進行調整的可移動光柵,此外還有一些附加燈,如角燈等等。 如圖3所示,電控單元LCM通過CAN總線從方向盤角度、車速、車身高度位移傳感器分別取得轉向輪旋轉角度、車體速度和車身傾斜度的精確信息。角度和速度信息通過LCM模塊精確計算后產生輸出信號,通過LIN總線通信分別控制左右兩個執行機構,來控制旋轉電機對前照燈進行水平旋轉,傾斜度信息控制調高電機對前照燈進行垂直旋轉。 圖3 AFS系統結構 2.1 硬件設計 執行控制器采用S12ZVL來實現LIN通信并控制步進電機調整車燈上下左右運動,同時實現一些輔助功能等。由于S12ZVL集成了LDO,LIN物理層等,所以可以簡化電路設計,減小PCB的尺寸。S12ZVL通過SPI接口來配置兩路NCV70522的電機控制參數,比如步進電機控制細分數,運行電流等,同時S12ZVL通過Timer模塊產生不同頻率脈沖來控制步進電機的速度,硬件結構圖如圖4所示。 圖4 AFS執行器硬件結構圖 2.2 軟件設計 S12ZVL的編程調試可以使用飛思卡爾的Code Warrior 10.6環境,界面比較人性化。AFS執行控制器程序包含主程序,LIN驅動程序,步進電機芯片的控制程序及標定程序等部分。其中主程序流程圖如圖5所示,LIN驅動程序可以使用飛思卡爾的LIN軟件包,其初始化可以通過LIN軟件包提供的接口函數實現,步進電機驅動IC的初始化主要通過SPI通信來實現,可以配置電機驅動IC的工作電流,步進電機的細分數等參數。在主循環中通過使用狀態機來實現函數的跳轉,從而實現LIN報文接收。 除了主程序之外,還有timer的中斷服務程序,中斷服務程序可以控制兩個步進電機的運行及停止,實現步進電機的加減速運動,同時也能實現一些LIN報文命令的動作,比如自校準運動,停止命令,復位命令等。 圖5 主程序流程圖 3 LIN通信實現 針對S08,S12以及S12 Magniv系列,飛思卡爾提供了符合LIN2.1,LIN2.0和SAE2602規范的軟件包,從而可以幫助開發者非常方便快速的開發出LIN通信程序。圖6為飛思卡爾的LIN驅動程序結構圖,LIN2.1 Core API 和J2602 Core API可以實現對LIN的初始化以及應用層與core層之間的信號傳遞功能,LIN2.1 TL層可以給測試者發送診斷請求,Low Level層處理程序與硬件之間的信號傳遞功能,比如字節發送,接收響應,Break檢測等。 圖6 LIN軟件包結構框圖 該軟件包除了驅動程序之外,還提供了方便開發者使用的圖形化配置工具NCF GUI,該工具可以根據LIN配置描述文件LCF和節點描述文件NCF自動生成節點的配置.c和.h文件,將LIN代碼配置文件,LIN驅動程序以及用戶應用軟件一起編譯,就可以生成實現LIN通信的可執行程序,如圖7所示。從而可以方便開發者將更多的時間放在應用程序的開發上。 圖7 LIN配置流程 4 總結 本文詳細介紹了飛思卡爾S12ZVL混合集成芯片在AFS中的應用,其中包括S12ZVL芯片的特點,AFS控制系統的結構,同時也詳細介紹了飛思卡爾的LIN通信軟件包。通過飛思卡爾S12ZVL混合信號集成芯片及飛思卡爾LIN通信軟件包,開發者可以快速實現LIN通信功能,同時可縮小產品尺寸、加快AFS執行控制器的開發過程。 |