|
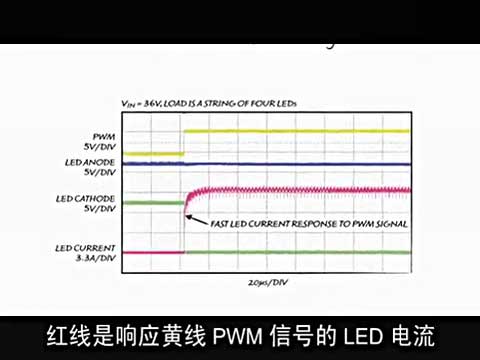
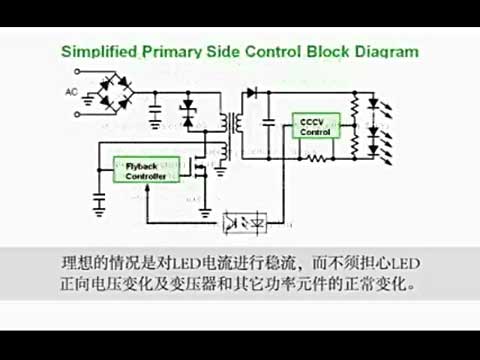
���� ���� LED �Ę��ƺ;���@ʾ���鲻�����L���҃�(n��i)�⑪�Î����˸���Ĺ����Լ��k���ZĿ��ҕ�XЧ����LED ���g�����°l(f��)չʹ�˂����y�ֱ���Լ������ĵ���������|(zh��)���@ʾ�����oֹ���棬߀�ǂ��y(t��ng)�Ĵ�ӡ���L�ƏV���ơ����̳̌�Ԕ����B LED �@ʾ��ϵ�y(t��ng)�Ļ������gԭ�����Լ�ʹ�÷��� LED ��������OӋ������Ҫ���]���OӋ���}�� LED �(q��)�ӻ��A ���ȣ��҂�Ҫ���Ȳ�ͬ��LED�(q��)���·���Դ_����ѷ����� �B��늉�Դ ������֪��LED ���������O�����ھ����������늉� (VF) �r�_ʼ��ͨ����ͨ�r���������ͨ�����l(f��)�⡣����(j��)�@������֪�R���Եó��D 1a �еĵ�һ�N�x헣����^�@���в�ͨ����� LED �������늉�ƫ�õ�ָ��(sh��)����(sh��)����ʽ 1����LED ���Ĺ⏊�Ȍ�ԓ늉��dz����С������(sh��)��r�£�������l��ͨ������ԭ���L������ LED ׃�ɰ��F���W����ݡ� ����ʽ 1�� �����LjD 1a �в�ͨ��ԭ�����ڡ��ڹ�ʽ 1 �У�IS��RS �dz���(sh��)��ȡ�Q�� LED �a(ch��n)Ʒ�������c VT �ǟ�늉��o�P�����O��(li��n)��� RS ������ֵ�㣬��ô�H 0.1V �� VF ׃���͕��a(ch��n)�� 47 ���� ILED ��� ����ʽ 2�� ���磬20mA ��Ŀ�� LED ���ֵ����ƫ��������F(xi��n)�H 0.1V �IJ�r�͕���׃�� 1A����ʹ���]���H RS ֵ���挍 LED �����ھ��� 0.1V ƫ�ò�r�ԕ����F(xi��n) 10 �� 20 ���IJ�� �D 1.�������N LED �(q��)���· ֧�������������늉�Դ �F(xi��n)���҂��������D 1b������һ����������� RLIMIT �����o LED ������������������������ԓ�����������ġ���ҕ�l�@ʾ�������I���@�N�����ڿ��� LED �⏊�ȷ�����Ȼ����á�LED ������ RLIMIT �a(ch��n)����ؓ�d�����ɛQ���� LED ���ֵ����tɫ���{ɫ��ӛ��ʾ��ԓ LED ��������քe���������`����ɵ�����늉�׃�������׃�����@Щ�`�����ؕ�ʹ LED ������G���a(ch��n)�����ɺ�ҕ��׃���� ����Դ �D 1c ���ú����·�����������ԓ�����(q��)�����·��ֱ�ӌ� LED ����{(di��o)��(ji��)��Ŀ��ֵ���oՓ LED ���������^���Е��a(ch��n)������ VF ׃����LED ���������ض������ֵ��LED ���Ĺ⏊���cͨ�^ PN �Y(ji��)�c��늺ɾo�����P�����ԓ�����(q��)�����Ǐ� LED ���@�ýy(t��ng)һ��ݔ�������뷽���� ���⣬�҂���֪�������· (IC) ���ṩ���õ�ƥ���·�����@Ҳ���x�����������һ����(y��u)�ݡ��D 2 �� LED �(q��)�����Ļ���ݔ�����Y(ji��)�����Ј��Ϻܶ� LED �(q��)���� IC ���Ѕ�������O�ö� IREF��ԓ����������R����ݔ���˵ĺ����� �D 2. LED �(q��)���� IC �Ļ���ݔ������ �D 2 ��ԓӑՓ�ĽY(ji��)������ LED �(q��)�����Ļ���ݔ���·���á� ɫ���(q��)�� ��Ŀǰ��ֹ���҂��ѽ�(j��ng)�܉�_������(q��)�ӆ� LED ���ˡ���һ���Ǟ�ҕ�l�@ʾϵ�y(t��ng)���F(xi��n)ȫɫ�ʹ�ݔ����ͨ�^�M�Ϲ�IJ�ͬ��\�t�G�{��ԭɫ (RGB)���κ�ɫ�ʶ������ɡ��^����Ϥ��ʾ���Dz��Â���Ӌ��C (PC) �ϵ�ɫ���x�ߡ� ��(sh��)�ֻ�ģ�M�Ļ��A���� PC ����ϵ�y(t��ng)�����Nɫ�ʻ�Ϟ� 256 ��ɫ�A��ÿ�A 8 �����M��λ������࣬���@ʾȫ��ɫ���ء����� LED �@ʾϵ�y(t��ng)���ԣ�Ҳ��Ҫ������ͬ�����ɫ�Aɫ�ʏ��ȿ��ƣ��Ա��� LED �(q��)�����OӋ�Ќ��F(xi��n)ɫ�A���ƻ���A���ơ� ���ȑ��Q��ʹ�Ô�(sh��)�ֿ���߀��ģ�M���ơ�ǰ���ѽ�(j��ng)��B�^����(j��ng)�^ PN �Y(ji��)�c�Ŀ�늺ɔ�(sh��)�ɛQ���⏊�ȣ���˔�(sh��)�ֺ�ģ�M�������ɿ��ƹ⏊�ȡ��D 3 �ǔ�(sh��)�ֺ�ģ�M���е� 50% ���A���ơ��ڿ��w 256 ��ɫ�A��ʾ���У�ԓ 50% ������һ���� 128 �����A��Ŀ�ˡ� �D 3.��(sh��)�ֺ�ģ�M�� 50% ���ȿ��� LED ����cɫ��׃�� �@�r����Ҫ���]���׃���� LED ��ݔ�����Lֵ��Ӱ푡���׃���L����ζ����׃?n��i)��ۿ�����ɫ�ʡ��D 4 �ǾGɫ LED ���Č�����ͨ���ژI(y��)�磬510nm �V�������Gɫ����ˣ��� LED �����������OӋ�� LED ���a(ch��n)Ʒ������~������¶��߂� 510nm �IJ��L���ڈD 4 �У��S�� LED ��������ߣ����L���_�� 510nm���@�þGɫ����ѷ����DZM��ʹ�����(q��)������ӽ�����~��ֵ���@Ҳ���f���˞�ʲôʹ�Ô�(sh��)�ֿ��Ʊ�ʹ��ģ�M���ƺá� �x��(sh��)�ֿ��Ƶ���һ����(y��u)���DZ����Ԕ�(sh��)���·ģ�K����ʽ�� LED �(q��)���� IC ��ʩ���ơ����� 256 �A�Ļ��A���ƶ��ԣ���(sh��)�ֿ��Ƶijɱ���ģ�M���Ƶ͡� �D 4.�Gɫ LED ����c���L���� �@�N ON/OFF ��(sh��)�ֿ��ƷQ֮���}���{(di��o)�� (PWM) ���ƣ����� PWM �{(di��o)�⡣�F(xi��n)�� PWM �����_�P�������D 2�� ��Θ��ɾ�ꇻ� 2D �D�� RGB LED ����ƽ䁘��� 2 �S (2D) Ӱ�� �@ʾϵ�y(t��ng)�Y(ji��)�� RGB LED �������ژ��������εĻ��A�Y(ji��)����ģ�K����ͨ������һ�K PCB �Լ�һ�� 16 �� 16 �� 64 �� 64 ��������У���ͬ�đ���������ͬ���Ɍ�����ģ�K�M����һ�𣬘��əCеϵ�y(t��ng)�Y(ji��)������塣LED �@ʾϵ�y(t��ng)�S��ͨ���ṩ���N��塣ÿ����嶼�ЙCе��ܣ��ɷ��ö���ģ�K��������һ����������Ɔ�Ԫ�������ṩ�Դ���䡢��(sh��)��(j��)�ӿں�̎�������ژ����w��������Ļ��·߅�V���Ƶ��@ʾϵ�y(t��ng)�ĬF(xi��n)�����ɰ��b���K��嘋����K�@ʾ������ʩ���F(xi��n)����ÿ�K�������Д�(sh��)��(j��)�����Դ������������������Ɔ�Ԫ�� �D 5.LED �@ʾϵ�y(t��ng)��ģ�K����壯�@ʾ���M�� �����g�� һ�� LED �@ʾϵ�y(t��ng)���������� LED ����һ�����Դ���OӋϵ�y(t��ng)�r��Ҫ���c���] LED �����ܶȃ�(y��u)�����}��LED ����ԓ�ܶȷQ��ÿ�����صľ��x�������g�ࡣ��������g��̫�ܣ�һ���������������R�e�ľ��ȣ����Ͳ�������Ӱ��ݔ���|(zh��)�������ҕ����ӳɱ������ۿ��R�e�ăɂ��ι�Դ�����@���c�γ� 1 �����ȵ� 1/60��=1 ���֣��r�� �D 6.���ۿ��R�e�ķֱ��� �D 6 �����Ӌ�����ۿɷֱ������g�� Dpp1���繫ʽ 3 ��ʾ������ L ��ҕ�ࡣ ����ʽ 3�� ����ь��`�У�DPP1 ��ҕ���^���ڸ��|(zh��)��ҕ�lϵ�y(t��ng)�������� Dpp1 �͉���ˡ��ڹ�ʽ 4 �У�DPP ��ָ���˜ʡ� ����ʽ 4�� ��ʽ 4 �ĺ���ӛ�������ǣ� ����������g�ࣨ���ף�mm��=��ҕ�ࡱ���ף�m�� ���磬5m ҕ���ϵ�y(t��ng)��Ҫ 5mm �����g���팍�F(xi��n)���÷ֱ��ʡ���һ��ҕ�X������D 7 ��ʾ���D��չʾ���^�������g����ν���ݔ��Ӱ���|(zh��)���������g���� 12.5mm ��Ӱ���ϣ��������ֲܴڣ��o�������x���R��������һ���ľ��x�^���rӰ���_ʼ׃���������c�^�������g���� 5mm ��Ӱ���£���ơ��@������������f����ҕ���c�����g����Pϵ�� �D 7.��ͬ�����g���cҕ��Č��� �o�B(t��i)�(q��)�����c�r�֏����(q��)���� �ĈD 2 ���Կ�����LED ����ꎘO���î�ǰ�Ј���Ҋ�� LED �(q��)���� IC �(q��)�ӡ��@��ҪӑՓ LED ����ꖘO�(q��)�����·��ꎘO���ú����(q��)�����Ѓ�(y��u)�ݣ�ꖘOϣ��Ҳֻ�ṩ����늉�����������������(q��)��ꖘO����Ҫ�Q���� �D 8 �������o�B(t��i)ꖘO�(q��)����ϵ�y(t��ng)�c�r�֏���ꖘO�(q��)����ϵ�y(t��ng)���o�B(t��i)ꖘO�(q��)��������ʮ�����_��һ�� LED �(q��)���� IC �(q��)��һ�� LED�����OӋ���д��������c��ϵ�y(t��ng)�r���o�B(t��i)ꖘO�(q��)������Ҫ���� LED �(q��)���� IC���෴���r�֏���ꖘO�(q��)����ϵ�y(t��ng)���� LED ������һ�� IC�����ʹ�õ� LED �(q��)���� IC ��(sh��)���^�١��r�֏����(q��)�����ę������ݔ�� LED �⏊�ȕ���֕r�����͡� �ڑ����@ʾϵ�y(t��ng)�У���Ҫ�O���� LED ݔ�����˷�̫ꖹ����ȣ��Ա������ܿ����Ӱ�����@�N����ϵ�y(t��ng)�У����m���x���o�B(t��i)ꖘO�(q��)��������һ���棬���҃�(n��i)ϵ�y(t��ng)�У��r�֏���ꖘO�(q��)�����t�ǽ���ϵ�y(t��ng)�����ɱ��ĺ÷����� �r�֏����ѽ�(j��ng)���ˮ�ǰ������õļ��g������҂����������ڱ���ʣ�ಿ��ӑՓ�đ����С� �D 8.�o�B(t��i)ꖘO�(q��)�����c�r�֏���ꖘO�(q��)���� ��΄�(chu��ng)���Ӱ/ҕ�lӰ�� ֮ǰ�҂�̽ӑ������@ʾ�o�B(t��i)Ӱ������҂�����׃���o�B(t��i)Ӱ�ͿɌ���׃?y��u)��Ӱ��ҕ�l�� ������/��ˢ���� ��ʽģ�M�ҕͨ����һ��犃�(n��i)�@ʾ 24 ����ͬ���o�B(t��i)Ӱ�����ʞ� 24�� ��ģ�M�ҕ�z��C�Ĕz��һ��ģ�M�ҕ��Ļ�r���ɮa(ch��n)����ҕ�lӰ���c��ɫ�l�����ɵİ��R�y��Ϯ��棨�D 9�����@�N�F(xi��n)����ͬ���ҕ�z��C���ҕ��Ļ�������������Ĕz LED ��Ļ�Ĕz��C���Õr�֏���ꖘO�(q��)�����r��Ҳ�����F(xi��n)��ͬ�Ć��}�����Ì�������ʹ���ҕ�z��C�Ĕz������������ LED �@ʾ���Ŵ��݆T�����_Ӱ��������ҕ�z��C�Ĕz�w�������w��ِ�±ȷ��ƻ���Ƶȡ�Ҫ�����@�����}��LED �@ʾ���F(xi��n)����Ҫ�Ȕz��Cϵ�y(t��ng)�\�еø��죬�e���ڌ��� LED �@ʾ���Ј��� �D 9. �ҕ�z��C�Ĕz��һ���ҕ��Ļ����ĺ�ɫ�l�� ��M������\���@һҪ�ܶ� LED �@ʾϵ�y(t��ng)����һ�������ڃ�(n��i)�����@ʾ��ͬ��Ӱ�Q�鎬ˢ���ʡ��D 10 �ǎ������cˢ���ʵ��Pϵ��ֻ�Ѓɏ���Ӱ��A �� B��ÿ�����؏͡�Ӱ�� x���ɴΡ��������������ˢ���ʡ�= 2 ���������ʡ��� �D 10.�������c��ˢ���� ����ͨ LED �@ʾϵ�y(t��ng)�У��������� 50Hz �� 120Hz �ķ�����(n��i)������ˢ���ʄt���� 50Hz �� 2kHz ֮�g�� ON/OFF �����(q��)������ PWM �����(q��)���� ���˝M��ϵ�y(t��ng)�������cˢ���ʵ�������Ҫ�ڌ�ʩ߉�·�ăɷN�����������x��һ�N�� ON/OFF �����(q��)���������ڶ��N�t�� PWM �����(q��)������ �D 11a �Dz��� ON/OFF ���� IC ��ϵ�y(t��ng)������ÿ��λ������һ��ݔ���� ON/OFF �Ĵ������Ĵ���λ��߉�߿ɴ��_������ݔ������߉�̈́t�Ɍ����P�]�� �D 11b �Dz��� PWM ���� IC ��ϵ�y(t��ng)������һ���Ʌ����r�Ӌ��(sh��)���Ļ��A�����r�ݔ��ˡ����⣬ԓ IC ߀����һ�M������A߉���a�ļĴ�����PWM ���^����ͨ�^Ӌ��(sh��)���ͻ��A (GS) �Ĵ������^������ PWM ݔ��ģʽ�� �����@�ɷN��͵��(q��)���� IC ���ԣ��ɷN�������Dz��Ј�(zh��)�еģ� - �����(q��)����ģ�K����(j��)��ǰ�@ʾ���ڔ�(sh��)��(j��)��ݔ���(q��)���� LED ����У� - ������һ���@ʾ���ڵĔ�(sh��)��(j��)��������λ�Ĵ����С� �D 11.���� ON/OFF ���� IC �� PWM ���� IC �� LED �@ʾϵ�y(t��ng) ���Y(ji��) ���Ƚ�B�� LED �����(q��)�����·����ӑՓԔ���� LED ���������ԡ��@ʾϵ�y(t��ng)�����������c�Y(ji��)���Լ��o�B(t��i)���r�֏��ÿ��ƣ��M���ó������� LED �(q��)���� IC �Y(ji��)���� �ڵ� 2 ���֣��҂�����BӰ��̎�������� IC �c LED �(q��)���� IC ֮�g�Ĕ�(sh��)��(j��)���ͣ����e������������߀��̽ӑ�c LED �@ʾ�(q��)���� IC ���P���������}�� |