|
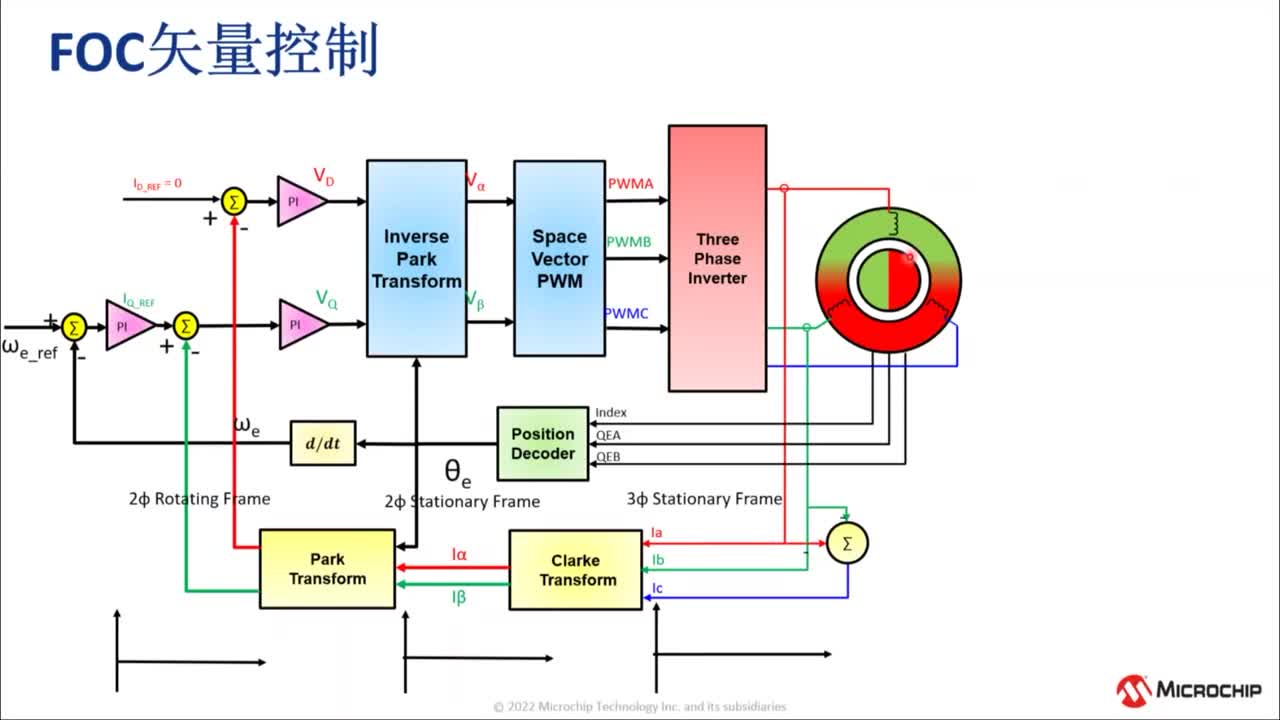
矢量控制(FOC)是空間矢量脈寬調制最重要的應用之一。矢量控制,又名磁場定向控制,其特點是通過坐標變換技術把交流電機定子電流分解為轉矩和磁通分量,從而實現像直流電機一樣的控制電機的輸出轉矩和磁通。矢量控制廣泛應用于永磁同步電動機(PMSM)的控制。 目前市場上較為常用的FOC方案會采用DSP、ASIC或通用MCU進行控制。DSP運算能力高,實時性強,常用于FOC控制,但存在著成本較高的缺點。ASIC將FOC固化在芯片內部,無需編程,但會帶來算法無法修改、不夠靈活的缺點。通用MCU種類較多,平臺復雜。常用的幾種方案一般至少還需要2個外部運放完成電流采樣。 另外還有一種基于PSoC4的方案,該方案利用PSoC4內部豐富的數字及模擬資源及獨有的可編程特性可實現高度集成化、低成本的矢量控制。圖1顯示了PSoC4矢量控制(無傳感器)硬件控制框圖。PSoC4內部集成四個獨立的可支持中央對齊、互補的可編程死區及同步ADC操作的TCPWM模塊,可用于SVPWM輸出;一個支持零開銷通道切換功能的12位1Msps ADC,用于電流采樣;兩個支持比較器模式及SAR ADC輸入緩沖功能的運算放大器,可省掉兩個外部運放。豐富的片內資源可將矢量控制主控電路所需芯片集成到一片芯片中,實現高度集成化。 
圖1:PSoC4 無傳感器FOC硬件控制框圖。 相對于其他解決方案,基于PSoC4的無傳感器FOC解決方案具有以下特點優勢: 1. 采用高性價比的Cortex-M0內核。Cortex-M0是市場上現有的最小、最節能的ARM處理器,代碼占用空間小,能以8位處理器的價格獲得32位處理器的性能,可明顯節約系統成本。 2. 內部集成兩個支持比較器模式及SAR ADC輸入緩沖功能的運算放大器。目前市場大部分解決方案均需外部運放完成電流采樣,采用PSoC4可從系統BOM表中移除外部運放,減少系統成本。 3. 內部集成兩個低功耗比較器,可用于硬件保護或錯誤信號處理。市場常用解決方案大部分采用外部比較器完成此功能。采用PSoC4可進一步減少BOM,降低成本。 4. 減少PCB空間及BOM成本。 5. 固件IP保護。PSoC提供了極強的軟件/硬件IP保護能力,這對電機應用尤其重要。 6. 靈活的通訊接口。PSoC特殊的可編程架構提供了極為靈活的通訊接口,可滿足各種應用的需求。 空間矢量脈寬調制原理 SVPWM是近年發展的一種比較新穎的調制方法,是由三相功率逆變器的六個功率開關元件組成的特定開關模式產生的脈寬調制波,能夠使輸出電流波形盡可能接近于理想的正弦波形。與電壓正弦PWM不同, SVPWM法是從電機的角度出發的,著眼于如何使電機獲得幅值恒定的圓形旋轉磁場,即正弦磁通, 模型構造簡單,便于數字化實現。與傳統電壓正弦PWM相比,該控制方法具有使得電機轉矩脈動降低、電流波形畸變減小、直流電壓利用率提高的優點。 圖2是一種典型的三相逆變器的結構, Va, Vb,Vc是逆變器的電壓輸出,Q1到Q6是6個功率晶體管,它們分別被a,a’,b,b’,c,c’這6個控制信號所控制。當逆變橋上半部分的功率管與下半部分的功率管為互補關系,即當a為1時,a’為0。
圖2:三相逆變器結構圖。 從圖3可以看出,開關變量矢量[a,b,c]有8個不同的組合值,即逆變橋上半部分的3個功率晶體管的開關狀態有8種不同的組合,故其輸出的相電壓和線電壓有8種對應的組合。開關變量矢量[a、b、c]與輸出的線電壓和相電壓的對應關系見表1。
圖3:基本電壓空間矢量。 在(α,β)坐標系中,輸出的三相線電壓可以用下面等式表示:
公式1
公式2 由表1可知,功率晶體管的開關狀態的組合一共只有8個,則在(α,β)坐標系中的Vsα、Vsβ也有8種組合。Vsα、Vsβ是空間矢量分解得到的子軸分量,它們的對應關系如表2所列。由此可得到8個基本電壓空間矢量,分別為 U0, U60,U120,U180, U240, U300, 0000和0111。其中0000和0111為零矢量。這六個非零基本電壓空間矢量將(α,β) 坐標平面分為六個扇區,如圖3所示。 由8個基本電壓空間矢量可以合成任意定子電壓矢量。如圖4所示,以U0, U60扇區為例,若在一個PWM周期T內,同時輸出T1時間U0矢量和T2時間的U60矢量,則由矢量(T1/T)U0,(T2/T)U60可以合成給定的參考電壓矢量Uout。
圖4:由基本電壓空間矢量合成的子電壓矢量。 由圖4可得:
公式3
公式4 因此,
公式5
公式6 可得 T1 ,T2
公式7
公式8
公式9
公式10 由此可知SVPWM實現步驟:先通過Uout判斷出電壓矢量所在扇區,再根據相鄰的電壓矢量及Uout計算出兩個基本矢量作用時間;最后根據兩個基本矢量作用時間計算出PWM開關時間及占空比。 基于PSoC4的設計實例 我們使用TCPWM模塊來實現SVPWM。TCPWM模塊提供了電機控制常用的中央對齊、邊沿對齊PWM,并可實現嚴格的同步功能。支持靈活的死區控制,并可與ADC同步。TCPWM包括四個16位的周期長度用戶可編程的計數器,這些計數器之間可以進行功能同步。每個模塊包含一個捕獲寄存器、一個周期寄存器以及一些比較寄存器。每個模塊都支持互補的可編程的死區,還支持一個關斷輸入信號來強迫輸出信號進入預先設定的狀態。 如圖5所示,從PSoC Creator中拖放三個TCPWM模塊,配置TCPWM的工作模式為中央對齊,帶死區的雙路互補輸出模式。三對PWM輸出可分別作為U、V和W相橋臂驅動信號(如PWM_U_Upper, PWM_U_Lower)。同時在任一TCPWM模塊的UN事件輸出(下溢信號,用來指示計數器向下計數達到“0”)觸發PWM中斷(PWM_MainLoop_ISR),用于進行FOC計算并更新占空比。
圖5:三相PWM原理圖。 “PWM_UPDATE”信號可在UN事件時觸發TCPWM的Switch事件,周期和比較寄存器上的值會自動與緩存周期和比較器寄存器的值更換。利用此特性,我們可以在TC事件之前更新緩存寄存器,然后用同一信號觸發不同PWM的Switch事件,由此保證各路PWM更新的嚴格實時同步。 圖中的控制寄存器(PWM_Ctrl_Reg)還可以同時使能或禁止六路PWM輸出。PSoC靈活的可編程特性可輕松實現了三對嚴格同步的互補對稱PWM及其更新邏輯,這樣可以使工程師將更多的時間專注于算法層面,提供產品的競爭力。 主控程序首先會初始化和配置PSoC4的內部資源,然后進入主循環。主循環主要檢測用戶的起停命令,決定電機的運動狀態;并完成一定的調試輸出功能。FOC主算法全部在PWM中斷中完成,主要完成坐標變換,SVPWM輸出及更新占空比等操作。中斷程序會人工生成一個周期性變化的角度,用于電機開環運行。圖6顯示了主控程序流程圖。
圖6:程序流程圖。 實驗結果 在PSoC Creator環境下編譯工程,并連接PSoC4開發板,三相全橋驅動板與PMSM電機,通電后電機可正常運行,圖7電機相電流波形。從測試結果可以看出,電流波形平滑,正弦度很好。
圖7相電流波形圖。 小結 上述實例介紹了如何在PSoC4 平臺上實現空間矢量脈寬調制。PSoC4針對電機控制做出了富有特色的優化。憑借片內豐富的資源及高度的靈活性,用戶可以輕松設計出高度集成化、低成本、性能優越的PMSM矢量控制系統,提高產品的核心競爭力。 |