博客
新手也可以看懂無感 FOC(一)
||
搞電機的應該都聽說過 FOC,那 FOC 究竟是什么?
FOC 是一種電機控制技術,全稱為 Field Oriented Control(磁場定向控制),也稱作矢量控制。該技術可以提高電機的效率、控制穩定性和精度,廣泛應用于電機驅動系統中,是目前無刷直流電機(BLDC)、永磁同步電機(PMSM)、感應電機的高效控制的最優方法之一。FOC 又分成無感 FOC 和有感 FOC,它們又有什么區別呢?
簡單來說,
無感 FOC:通常采用單電阻、雙電阻,三電阻等方式進行采樣,或者采用反電動勢進行電機轉子位置計算,此方式對電機控制精度稍微較低,穩定性不如有感 FOC,算法處理上更加復雜,但優勢在于成本更低。
有感 FOC:使用磁傳感器,如霍爾,或者光學編碼器或者磁編碼器等傳感器來感知轉子位置和速度,使用此方式可以更在精確和穩定進行電機定位和轉速控制。
因此,它們在應用上也有區別:一般無感 FOC 用于吹風機、牙刷等不需要對電機精確定位的,而在于工業機床、機械臂等對精度有高要求時,用有感 FOC。
了解完無感 FOC 和有感 FOC 的簡單區別以后,下面我們將著重介紹一下無感 FOC 的整個流程和原理。
FOC 的雙環控制(電流環、速度環)內環為電流環,外環為速度環,雙環控制通過控制電流的大小可以實現電機轉速的精確控制,整個雙環控制的框圖如下圖所示:
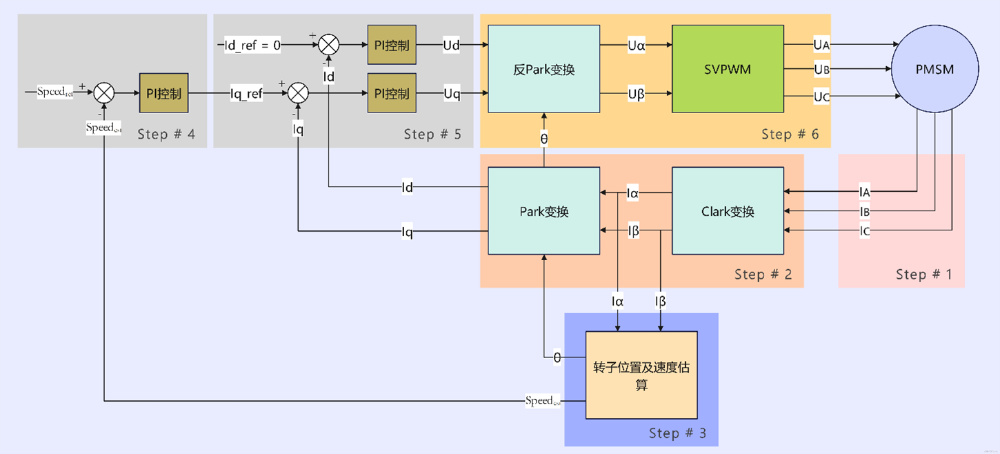
我們可以看到,框圖里的內環是分成了六個步驟,整個 FOC 的算法流程是這樣的:
1.采集三相電流 IA、IB、IC;
2.將三相電流進行 Clark 變換得到兩相靜止坐標系下的電流 Iα、Iβ 這是兩個正交的電流信號;
3.再將 Iα、Iβ 進行 Park 變換得到旋轉坐標系下的電流 Id、Iq;
4.Id 估算出轉子的轉速 Speed_est 以及角度 θ;
5.計算轉子的實際轉速 Speed_est 與設定的目標轉速 Speed_ref 的誤差
6.將誤差丟入 PI 控制器,執行器輸出 Iq_ref;(肯定會有人疑問為什么Id_ref=0,這個后面講)
7.計算 Id、Iq 與設定值 Id_ref、Iq_ref 的誤差;
8.將誤差分別丟入 PI控制器,執行器分別輸出 Ud、Uq;
9.Ud、Uq 進行反 Park 變換得到 Uα、Uβ;
10.最后 Uα、Uβ 經過 SVPWM 變成作用在三相上的電壓 UA、UB、UC;
看到這大家肯定疑惑了,這么多變換,FOC 到底控制的是什么?
首先我們看一下一個 PMSM 電機勻速轉起來的時候,用示波器觀察它的三相電壓是三個兩兩相差 120° 的正弦電壓波型,如下圖所示:
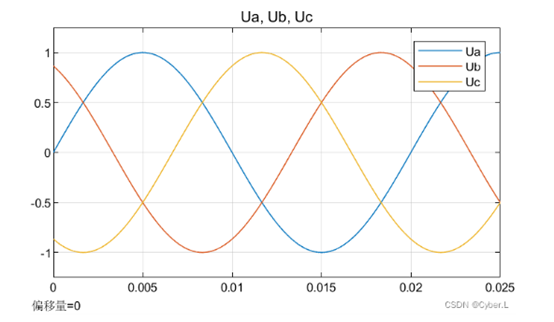
那我們是不是可以理解為,當我在三相上面輸入三個兩兩相位差為 120° 的正弦電壓的時候,電機就回勻速轉起來,那輸入所激勵的電流是不是也是正弦波?也就是如果我們利用算法將輸入電流按正弦波變化,電機就能轉起來了。
說到這,其實大家就能明白,無感 FOC 其實就是在控制三相的電流按照正弦變化。但是呢我們如果要同時控制三個變量按照幅值不變的正弦波一樣在變化是很難做到的,控制器的設計也會變得相當復雜,所以我們要簡化控制變量,這時候就需要用到 Clark 變化和 Park 變換了。
這一節我就先帶大家了解 了:
- FOC 的概念
- 無感 FOC 和有感 FOC 的區別
- 無感 FOC 算法的流程
- 無感 FOC 到底在控制什么




