博客
多重動力傳輸機器人系統,適用于MRI引導經皮介入治療
||
根據美國癌癥協會收集的數據,前列腺癌是美多年來開發的國男性中最常見的癌癥之一。據估計,2016年將有180,890例新的前列腺癌病例,并因此導致26,120例死亡。大多數前列腺癌是在前列腺特異性抗原(PSA)篩查和/或直腸指檢(DRE)期間首先檢測到的。如果結果表明受試者可能患有前列腺癌,則通常在TransRectal UltraSound(TRUS)的指導下進行手動活檢。如果活檢結果為陽性,則常見的治療方法是TRUS引導的近距離放射治療。不幸的是,TRUS提供低分辨率的圖像和較差的軟組織對比度,醫生既看不到惡性組織,也看不到圖像上的放射性種子,這破壞了活檢或近距離放射治療的性能。因此,磁共振成像(MRI)可以被認為是一種有前途的替代方法,因為它具有高體積分辨率和出色的軟組織對比度。此外,研究人員還試圖應用機器人系統來解決手動執行的經皮干預缺乏準確性和可重復性的問題。
在微創前列腺經皮介入治療中,磁共振成像(MRI)機器人輔助系統經過多年的開發,具備多個自由度(DOF)以完成復雜的外科手術任務。
本文提出了一種與MRI兼容的變速箱的新穎設計,該變速箱允許一個驅動馬達控制多路自由度機器人系統。變速器可以通過順序而不是同時控制每個運動來減少系統中電動機的數量,同時保持系統的功能。進行了一系列初步實驗以及目標精度測試,以評估系統的準確性。
盡管分別具有MRI指導和機器人輔助的優勢,但在該領域,兩種方法的結合仍然具有挑戰性。機器人的工作環境是具有高磁場的密閉空間。可以訪問的有限空間要求系統緊湊,同時又要保持較大的工作空間。為安全起見,盡管高密度磁場中僅允許使用非鐵磁材料(例如聚合物復合材料),但是這些類型的材料的機械性能會損害系統的性能。另外,由于機器人系統本身是機電一體化系統,會在成像過程中引入噪聲,因此減少機器人操作過程中的干擾也是開發MRI指導機器人系統的重要因素。
鑒于上述所有挑戰,設計、制造和評估了許多MRI引導的手術機器人,以幫助我們更好地了解系統的設計過程以及成像系統和機器人之間的相互作用。
實驗
實驗的目的是評估采用變速箱后機器人的性能。
A. 初步實驗
這些測試的目的是調查基本任務(例如移動滑塊)的總體性能。這也可以作為以后目標實驗的參考基準。
B. 靶向實驗
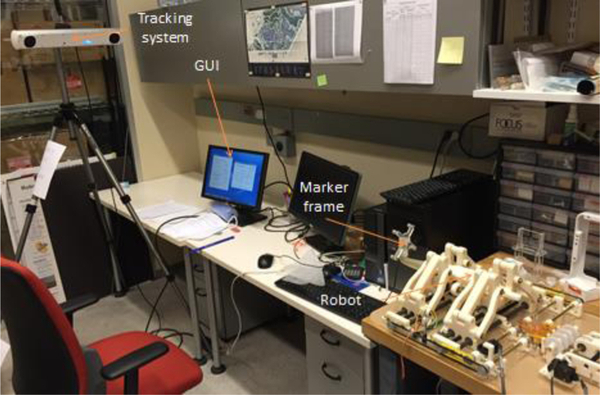
進行定向實驗是為了查看系統在完成諸如到達目標點之類的高級任務方面的性能。為了追蹤手術針的位置并收集數據,采用了Atracsys fusionTrack 500光學定位導航系統,其在2m的距離內具有0.09 mm的RMS。可追蹤的標記框固定在針頭支架上,并且在每個所需位置收集標記框相對于追蹤坐標的位置和方向。
舜若科技整理并原創。轉載請注明出處。




