1.png
2.png
3.png
4.png
5.png
6.png
7.png
8.png
9.png
10.png
11.png
12.png
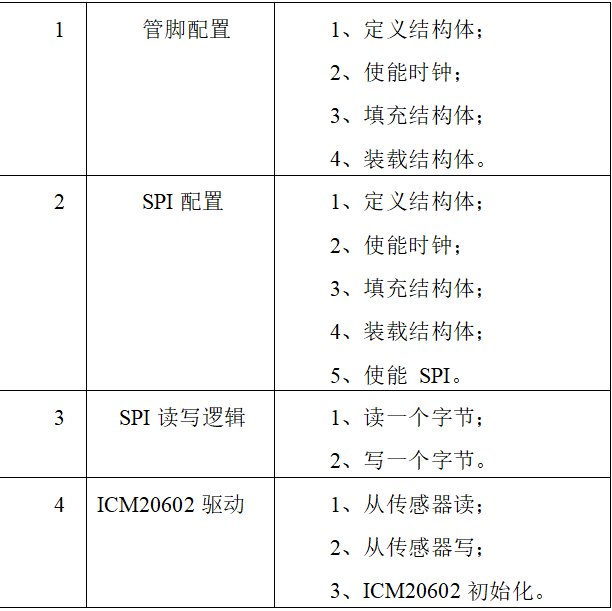
表1.png
13.png
14.png
15.png
16.png
17.0.png
17.1.png
18.png











 【6】SPI(六軸傳感器數(shù)據(jù)獲取).pdf
(1.19 MB)
【6】SPI(六軸傳感器數(shù)據(jù)獲取).pdf
(1.19 MB)