博客
【洞幺邦】淺析智能小車系統及其電磁干擾
|
智能小車是一種以汽車電子為背景,涵蓋控制、傳感技術、模糊識別、電子、計算機、機械、電氣等多學科知識的科技創意性設計。筆者將以高校常見的智能小車為研究對象,淺析智能小車系統及其電磁干擾。
一般的,智能車系統主要由四個子系統構成:信息檢測系統、控制決策系統、人機交互以及能動系統。以筆者曾經接觸的智能小車為例,如下圖所示:

![]()
智能小車實物圖
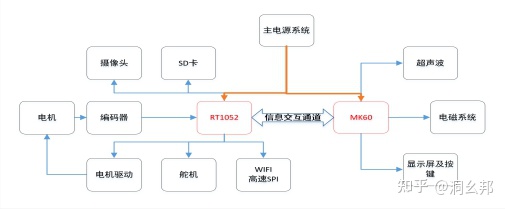
該智能小車系統框圖具體如下:
![]()
智能小車系統框圖
其信息檢測模塊含有:攝像頭模塊、電磁檢測模塊、超聲波模塊三大模塊構成;控制決策系統由飛思卡爾公司的MK60芯片(總線時鐘48MHz)以及野火電子設計的基于i.MX RT1052芯片(主頻600MHz)的核心板構成雙核控制系統;人機交互系統基于SD卡模塊、WIFE模塊、顯示屏與按鍵,以實現信息存取、查看、實時調試等功能;動力系統則由舵機、電機、編碼器以及電機驅動模塊構成。設計者還額外設計了一個主電源系統,產生常用電壓源。整個系統在兩塊芯片的同時控制下,實現賽道信息采集、系統機動決策控制、動力驅動操作,以成功完成比賽。

![]()
智能車競技
無論是整個龐大的智能車系統本身,還是比賽場地,電磁環境都十分復雜,存在EMI的原因也是多種多樣的。站在系統內、外的角度分析,智能小車所受到的干擾可主要分為系統內的電磁干擾和系統外的電磁干擾。

![]()
智能小車受到的電磁干擾
智能小車系統內部的電磁干擾主要來源有:小車的大功率動力裝置(基于8個大功率MOS管的全橋驅動電路)、電機電流測量裝置、主電源、高頻數字電路(LCD顯示屏、高速SPI接口)、高頻模擬電路(攝像頭圖像數據采集模塊)以及具有無限發射功能的WIFI模塊(射頻)等,這些模塊與電路有著高能量、高頻率、高速率的特點,因此它們都是智能小車內部的主要干擾源。同時,小車系統內部的電路走線、器件布局、以及PCB板其它不完善的設計都將導致車體內部局部電荷積累,而造成系統內部的電磁干擾,同時向系統外輻射電磁干擾。
智能小車受到的系統外的電磁干擾也是多樣的,主要來源于人類活動,造成不利于小車競技的比賽環境。如:比賽場地上無限電發射機有意產生的電磁能量(如:無限廣播、無限電視、無限測速裝置等發出的電磁能量),以及這些無線電發射裝置和其他裝置在完成自身功能的同時所附帶產生的電磁能量發射(如照明裝置、其他競技小車,以及賽場上的其他電子設備等)。
在智能小車設計過程中,要有意識分析小車系統所受電磁干擾,且應采取有效措施將其消除或屏蔽。如此一來,可以有效的避免電磁干擾帶來的突發事件。




